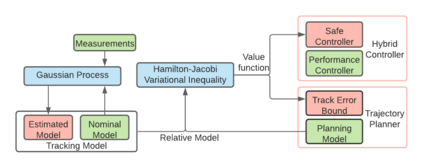
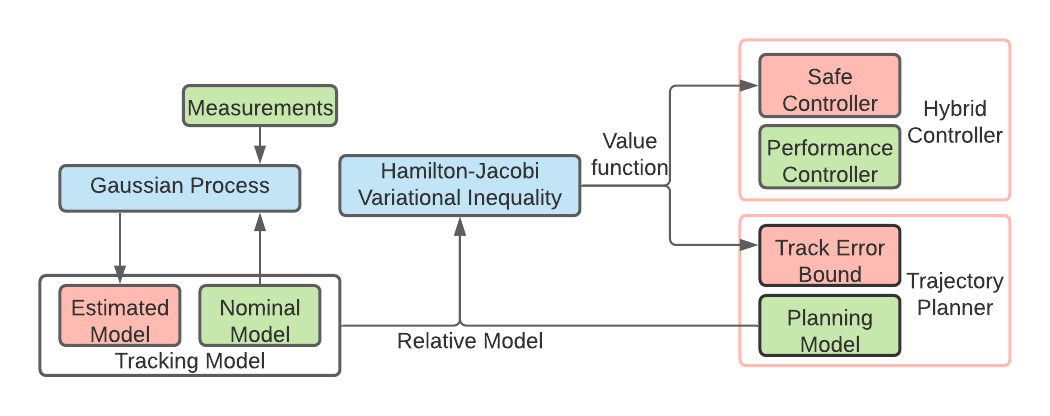
We propose a safety-guaranteed planning and control framework for unmanned surface vessels (USVs), using Gaussian processes (GPs) to learn uncertainties. The uncertainties encountered by USVs, including external disturbances and model mismatches, are potentially state-dependent, time-varying, and hard to capture with constant models. GP is a powerful learning-based tool that can be integrated with a model-based planning and control framework, which employs a Hamilton-Jacobi differential game formulation. Such a combination yields less conservative trajectories and safety-guaranteeing control strategies. We demonstrate the proposed framework in simulations and experiments on a CLEARPATH Heron USV.
翻译:我们提议为无人表面船只(USVs)提供安全的规划和控制框架,利用Gaussian流程学习不确定性;USV遇到的不确定性,包括外部扰动和模型不匹配,可能取决于国家、时间长短和难以用恒定模型捕捉;GP是一个强有力的学习工具,可以与基于模型的规划和控制框架相结合,该框架采用汉密尔顿-Jacobi差异游戏配方。这种组合产生保守的轨迹和安全保障控制战略。我们在CLEAPTH Heron USV的模拟和实验中展示了拟议的框架。