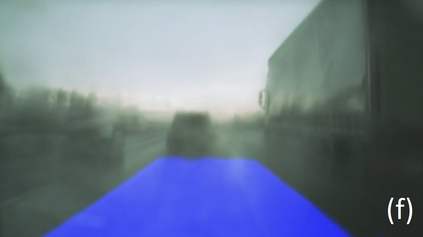
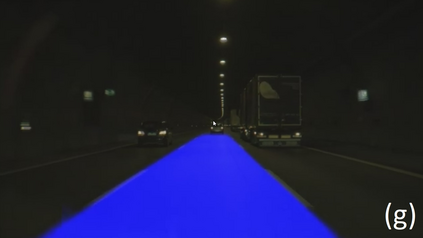
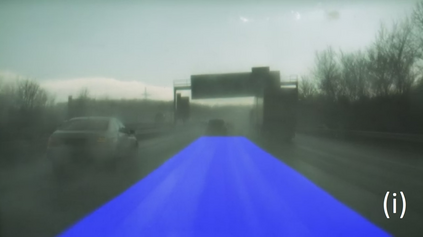
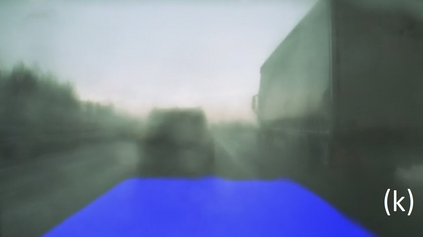
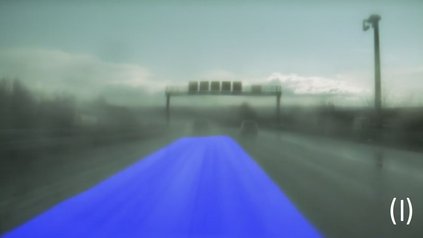
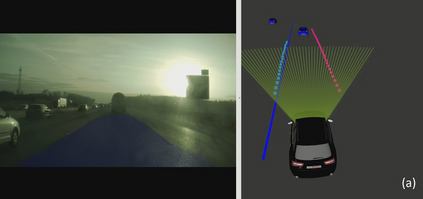
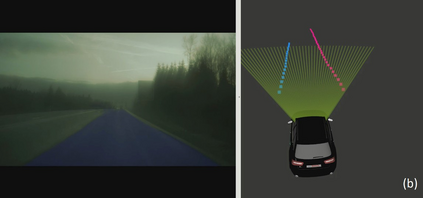
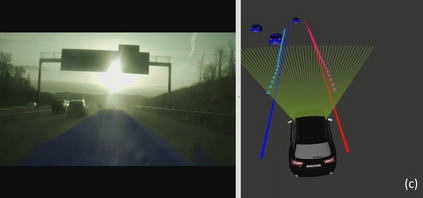
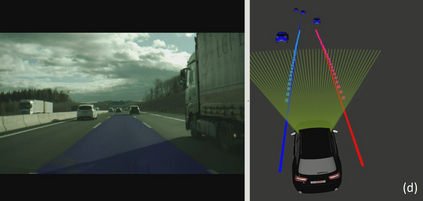
Lane detection is an essential part of the perception sub-architecture of any automated driving (AD) or advanced driver assistance system (ADAS). When focusing on low-cost, large scale products for automated driving, model-driven approaches for the detection of lane markings have proven good performance. More recently, data-driven approaches have been proposed that target the drivable area / freespace mainly in inner-city applications. Focus of these approaches is less on lane-based driving due to the fact that the lane concept does not fully apply in unstructured, residential inner-city environments. So-far the concept of drivable area is seldom used for highway and inter-urban applications due to the specific requirements of these scenarios that require clear lane associations of all traffic participants. We believe that lane-based, mapless driving in inter-urban and highway scenarios is still not fully handled with sufficient robustness and availability. Especially for challenging weather situations such as heavy rain, fog, low-standing sun, darkness or reflections in puddles, the mapless detection of lane markings decreases significantly or completely fails. We see potential in applying specifically designed data-driven freespace approaches in more lane-based driving applications for highways and inter-urban use. Therefore, we propose to classify specifically a drivable corridor of the ego lane on pixel level with a deep learning approach. Our approach is kept computationally efficient with only 0.66 million parameters allowing its application in large scale products. Thus, we were able to easily integrate into an online AD system of a test vehicle. We demonstrate the performance of our approach under challenging conditions qualitatively and quantitatively in comparison to a state-of-the-art model-driven approach.
翻译:测道是任何自动化驾驶(AD)或高级驾驶协助系统(ADAS)的分结构概念的基本组成部分。当侧重于用于自动化驾驶的低成本大型产品时,发现车道标识的模型驱动方法已证明表现良好。最近,有人提议采用数据驱动方法,针对主要在市中心应用的可耕地/自由空间,主要针对内城应用的可耕地/自由空间。这些方法的重点较少放在基于车道的驾驶上,因为车道概念并不完全适用于不易结构的住宅内城环境。如此之远的可驾驶区概念很少用于公路和城市间应用,因为这些情形的具体要求需要所有交通参与者明确的车道联系。我们认为,在城市间和高速公路情景中,基于车道的无地图驱动方法仍然不够完善,特别是对于大雨、雾、低日光、黑暗或泥滩中反射等具有挑战性的天气状况,对车道标识的无地图检测大大降低或完全失败。我们发现,在具体设计、设计、自由车道测试的车辆测试方法中,在高轨道上,我们利用高路路路路路路路路路段的升级的系统,具体地将一个我们学习的升级的系统。我们利用了一种高路路路路路路路路路路路路路路的升级的升级的升级的升级。