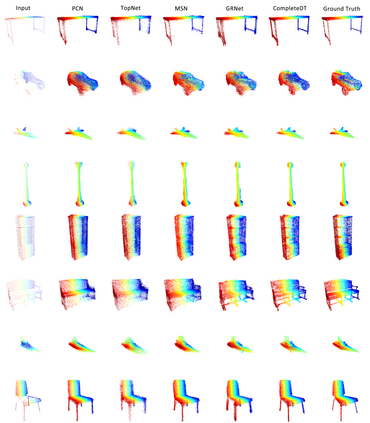
Point cloud completion task aims to predict the missing part of incomplete point clouds and generate complete point clouds with details. In this paper, we propose a novel point cloud completion network, namely CompleteDT. Specifically, features are learned from point clouds with different resolutions, which is sampled from the incomplete input, and are converted to a series of \textit{spots} based on the geometrical structure. Then, the Dense Relation Augment Module (DRA) based on the transformer is proposed to learn features within \textit{spots} and consider the correlation among these \textit{spots}. The DRA consists of Point Local-Attention Module (PLA) and Point Dense Multi-Scale Attention Module (PDMA), where the PLA captures the local information within the local \textit{spots} by adaptively measuring weights of neighbors and the PDMA exploits the global relationship between these \textit{spots} in a multi-scale densely connected manner. Lastly, the complete shape is predicted from \textit{spots} by the Multi-resolution Point Fusion Module (MPF), which gradually generates complete point clouds from \textit{spots}, and updates \textit{spots} based on these generated point clouds. Experimental results show that, because the DRA based on the transformer can learn the expressive features from the incomplete input and the MPF can fully explore these feature to predict the complete input, our method largely outperforms the state-of-the-art methods.
翻译:点完成任务旨在预测不完整点云的缺失部分, 并生成包含细节的完整点云。 在本文中, 我们提出一个新的点云完成网络, 即 完整 DDT 。 具体地说, 从点云中学习不同分辨率的特征, 从不完整的输入中取样, 并根据几何结构转换成一系列\ textit{ spots} 。 然后, 以变压器为基础的“ 强烈关系增强模块 (DRA) ”, 以多层次的密度连接方式学习这些\ textit{ spot} 的特征, 并考虑这些\ textit{ spotes} 之间的关联。 DRA 由点本地- 注意模块(PLA) 和点 点 点 tency- 多层次关注模块(PDMA) 组成, PLA 获取本地\ textitle{ spot} 的本地信息, 通过调整测量邻居和 PDMDMA 之间的权重度, 利用这些变压的变压方法, 来从清晰的流流流流 和结果, 显示这些变压 。