
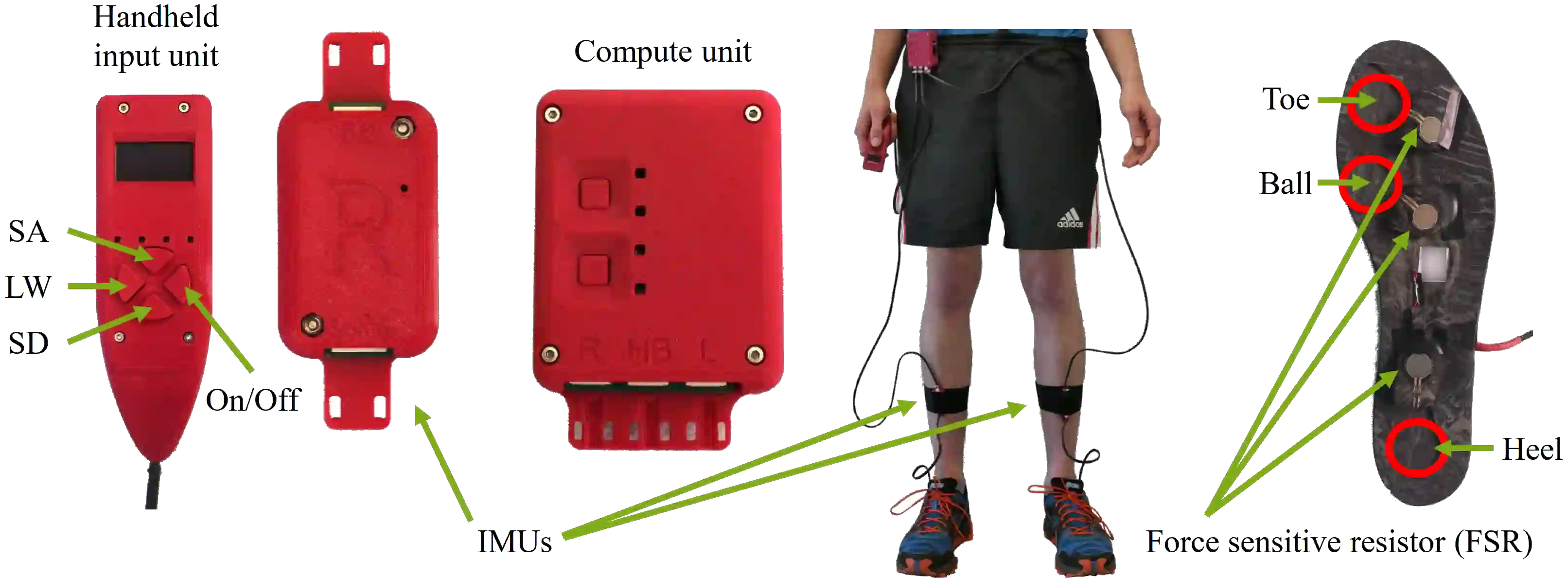
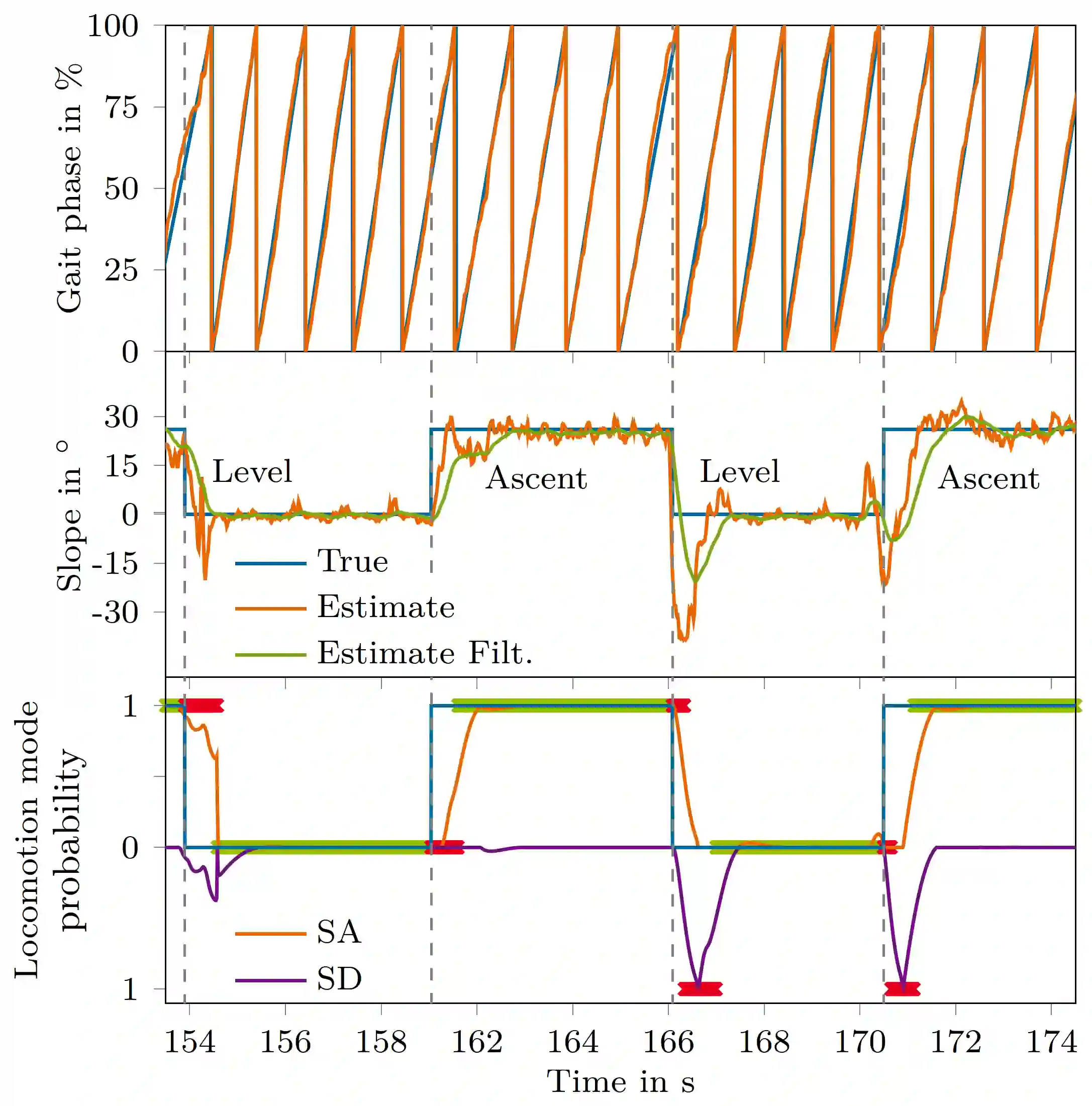
To improve the control of wearable robotics for gait assistance, we present an approach for continuous locomotion mode recognition as well as gait phase and stair slope estimation based on artificial neural networks that include time history information. The input features consist exclusively of processed variables that can be measured with a single shank-mounted inertial measurement unit. We introduce a wearable device to acquire real-world environment test data to demonstrate the performance and the robustness of the approach. Mean absolute error (gait phase, stair slope) and accuracy (locomotion mode) were determined for steady level walking and steady stair ambulation. Robustness was assessed using test data from different sensor hardware, sensor fixations, ambulation environments and subjects. The mean absolute error from the steady gait test data for the gait phase was 2.0-3.5 % for gait phase estimation and 3.3-3.8{\deg} for stair slope estimation. The accuracy of classifying the correct locomotion mode on the test data with the utilization of time history information was in between 98.51 % and 99.67 %. Results show high performance and robustness for continuously predicting gait phase, stair slope and locomotion mode during steady gait. As hypothesized, time history information improves the locomotion mode recognition. However, while the gait phase estimation performed well for untrained transitions between locomotion modes, our qualitative analysis revealed that it may be beneficial to include transition data into the training of the neural network to improve the prediction of the slope and the locomotion mode. Our results suggest that artificial neural networks could be used for high level control of wearable lower limb robotics.
翻译:为了更好地控制可磨损的机器人以助行器,我们展示了一种方法,根据人工神经网络,包括时间历史信息,进行连续运动模式识别以及运动阶段和楼梯斜坡估计,输入功能完全由经处理的变量组成,这些变量可以用单伸缩惯性惯性测量单元来衡量。我们引入了一种可磨损的设备,以获取真实世界环境测试数据,以显示该方法的性能和稳健性。为稳定水平行走和稳定空气中稳稳定的轨动振动周期和轨动模式确定了一个绝对错误(关机阶段、楼梯斜坡)和精度(旋转模式)。根据不同传感器硬件、传感器修正、振动环境及主题的测试数据来评估强势。从稳健的步态测试数据测试数据数据中得出的绝对错误是:2.0-3.5 %用于剧情阶段估测,3.3-3.8立度估测斜度。在测试数据中对正轨性测得的轨迹模式进行精确性分类,使用时间历史信息的结果介于98.51%和99.67%之间。结果显示,在轨变压性轨道过渡期间显示高性网络表现和稳性运行状态,用于持续测测测程阶段。

相关内容

Source: Apple - iOS 8

