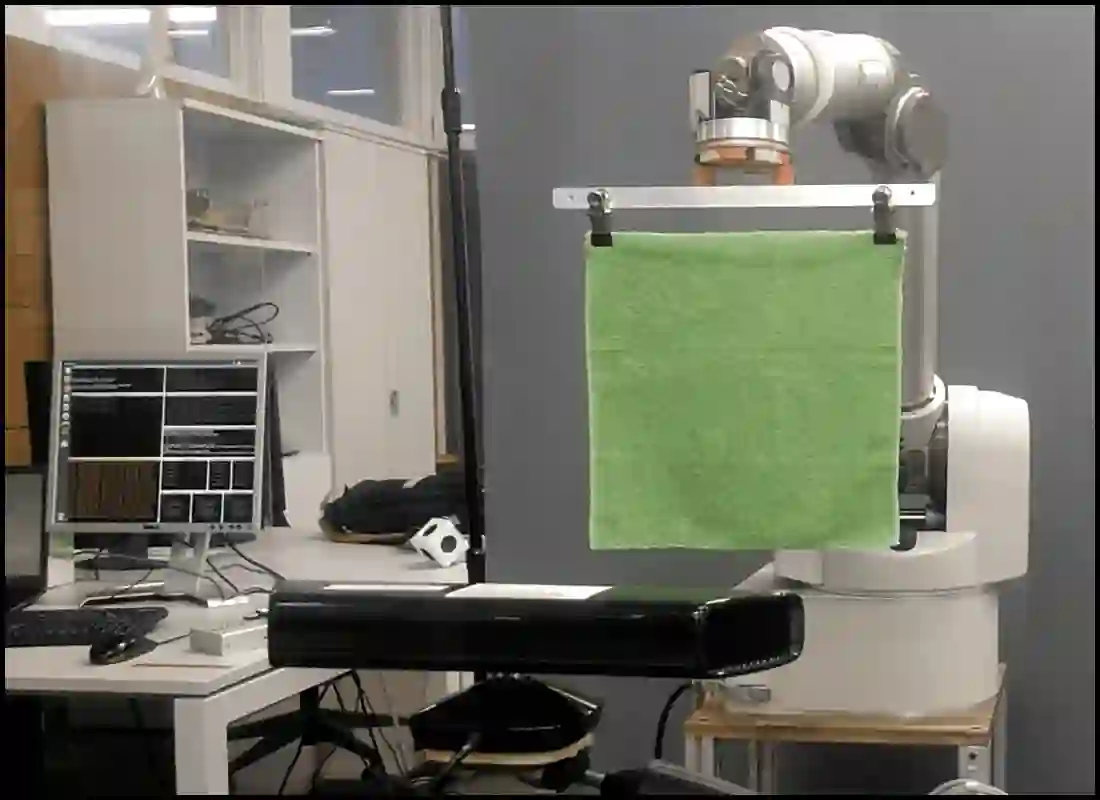
Robotic cloth manipulation is a relevant challenging problem for autonomous robotic systems. Highly deformable objects as textile items can adopt multiple configurations and shapes during their manipulation. Hence, robots should not only understand the current cloth configuration but also be able to predict the future possible behaviors of the cloth. This paper addresses the problem of indirectly controlling the configuration of certain points of a textile object, by applying actions on other parts of the object through the use of a Model Predictive Control (MPC) strategy, which also allows to foresee the behavior of indirectly controlled points. The designed controller finds the optimal control signals to attain the desired future target configuration. The explored scenario in this paper considers tracking a reference trajectory with the lower corners of a square piece of cloth by grasping its upper corners. To do so, we propose and validate a linear cloth model that allows solving the MPC-related optimization problem in real time. Reinforcement Learning (RL) techniques are used to learn the optimal parameters of the proposed cloth model and also to tune the resulting MPC. After obtaining accurate tracking results in simulation, the full control scheme was implemented and executed in a real robot, obtaining accurate tracking even in adverse conditions. While total observed errors reach the 5 cm mark, for a 30x30 cm cloth, an analysis shows the MPC contributes less than 30% to that value.
翻译:对自主机器人系统来说,机器人布的操纵是一个具有挑战性的问题。高度变形的物体,因为纺织品在操作过程中可以采用多种配置和形状。因此,机器人不仅应该理解目前的布布配置,而且应该能够预测布的未来可能行为。本文件通过使用模型预测控制战略(MPC),对物体的其他部分采取相应行动,从而可以预见间接控制点的行为,从而解决间接控制一个纺织品物体的某些点的配置问题。设计中的控制器发现最佳控制信号,以便实现预期的未来目标配置。本文中探讨的情景是,通过抓住一块正方形布的下角跟踪一个参考轨迹。为此,我们提议并验证一个线性布模型,以便能够实时解决与MPC有关的优化问题。 使用强化学习(RL)技术来学习拟议布模式的最佳参数,并调节间接控制点的行为。在获得模拟的准确跟踪结果后,完全控制方案在真正的机器人中实施和执行,获得准确的平方格布的底径跟踪,甚至以逆角跟踪。为此,我们提议并验证出一条线性布状模型,但总值为30个,显示总值为30个。