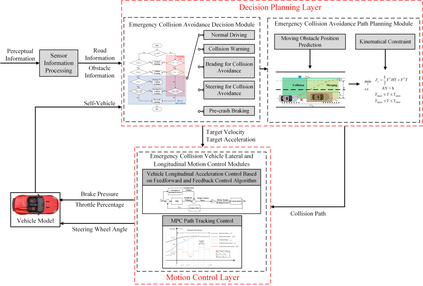
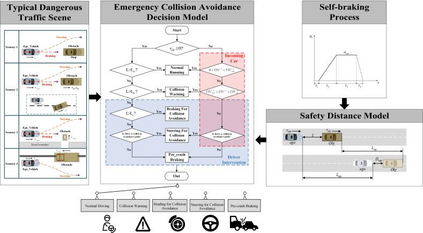
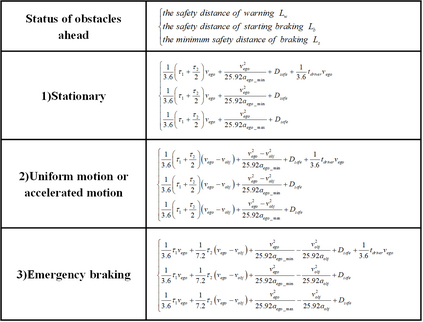
With the rapid development of autonomous driving, the attention of academia has increasingly focused on the development of anti-collision systems in emergency scenarios, which have a crucial impact on driving safety. While numerous anti-collision strategies have emerged in recent years, most of them only consider steering or braking. The dynamic and complex nature of the driving environment presents a challenge to developing robust collision avoidance algorithms in emergency scenarios. To address the complex, dynamic obstacle scene and improve lateral maneuverability, this paper establishes a multi-level decision-making obstacle avoidance framework that employs the safe distance model and integrates emergency steering and emergency braking to complete the obstacle avoidance process. This approach helps avoid the high-risk situation of vehicle instability that can result from the separation of steering and braking actions. In the emergency steering algorithm, we define the collision hazard moment and propose a multi-constraint dynamic collision avoidance planning method that considers the driving area. Simulation results demonstrate that the decision-making collision avoidance logic can be applied to dynamic collision avoidance scenarios in complex traffic situations, effectively completing the obstacle avoidance task in emergency scenarios and improving the safety of autonomous driving.
翻译:随着自动驾驶技术的快速发展,学术界越来越关注在紧急情况下的防碰撞系统开发,这对驾驶安全有着至关重要的影响。然而,近年来出现了许多防碰撞策略,但大多数只考虑了转向或刹车。驾驶环境的动态和复杂特性提出了在紧急情况下开发坚固的碰撞避免算法的挑战。为了应对复杂动态的障碍物场景并提高横向机动性,本文建立了一个多层次决策避障框架,采用安全距离模型,并集成了紧急转向和刹车,完成障碍物避让过程。这种方法有助于避免由于转向和刹车行动分离而导致的高风险车辆不稳定情况。在紧急转向算法中,我们定义了碰撞危险时刻,并提出了一种多约束动态碰撞避让规划方法,考虑了驾驶区域。仿真结果表明,这种决策避障逻辑可应用于复杂交通情况下的动态避障场景,可以有效地完成紧急情况下的障碍物避让任务,提高自动驾驶的安全性。