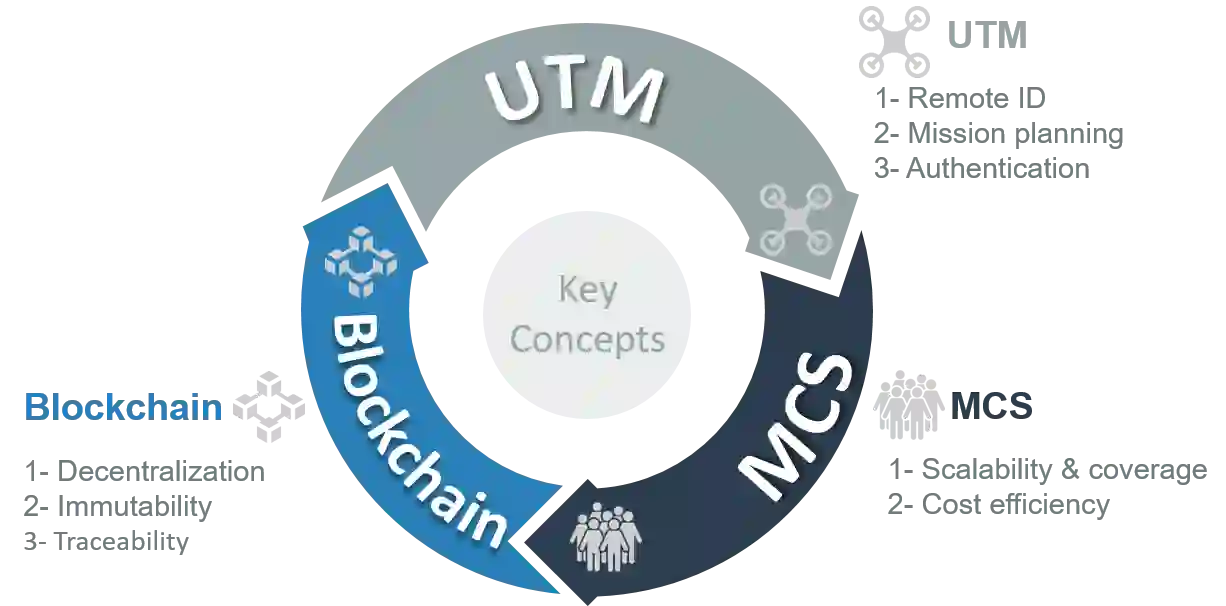
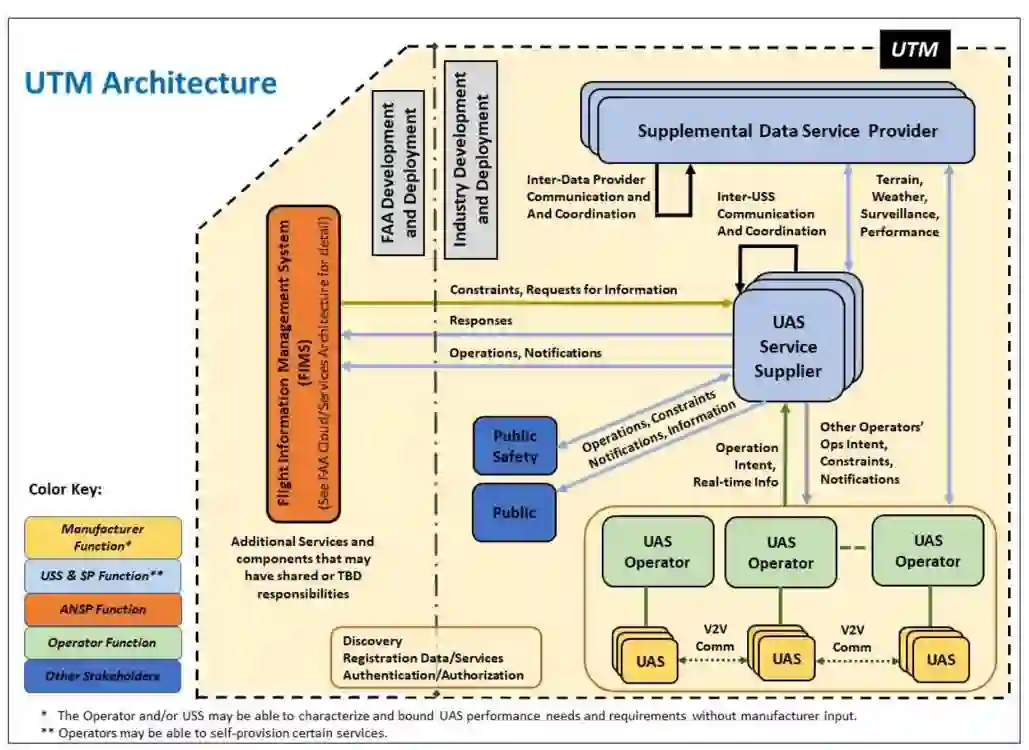
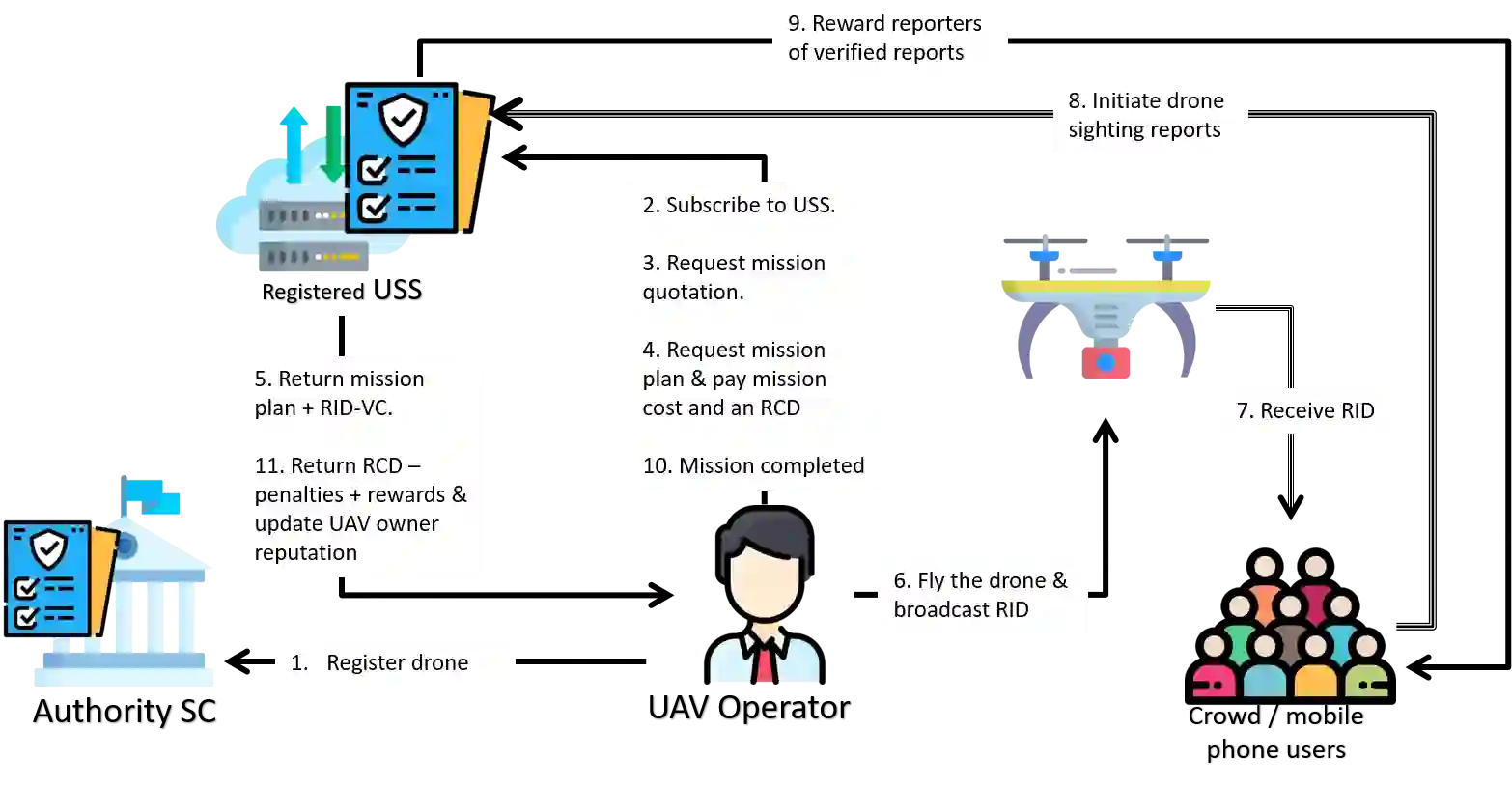
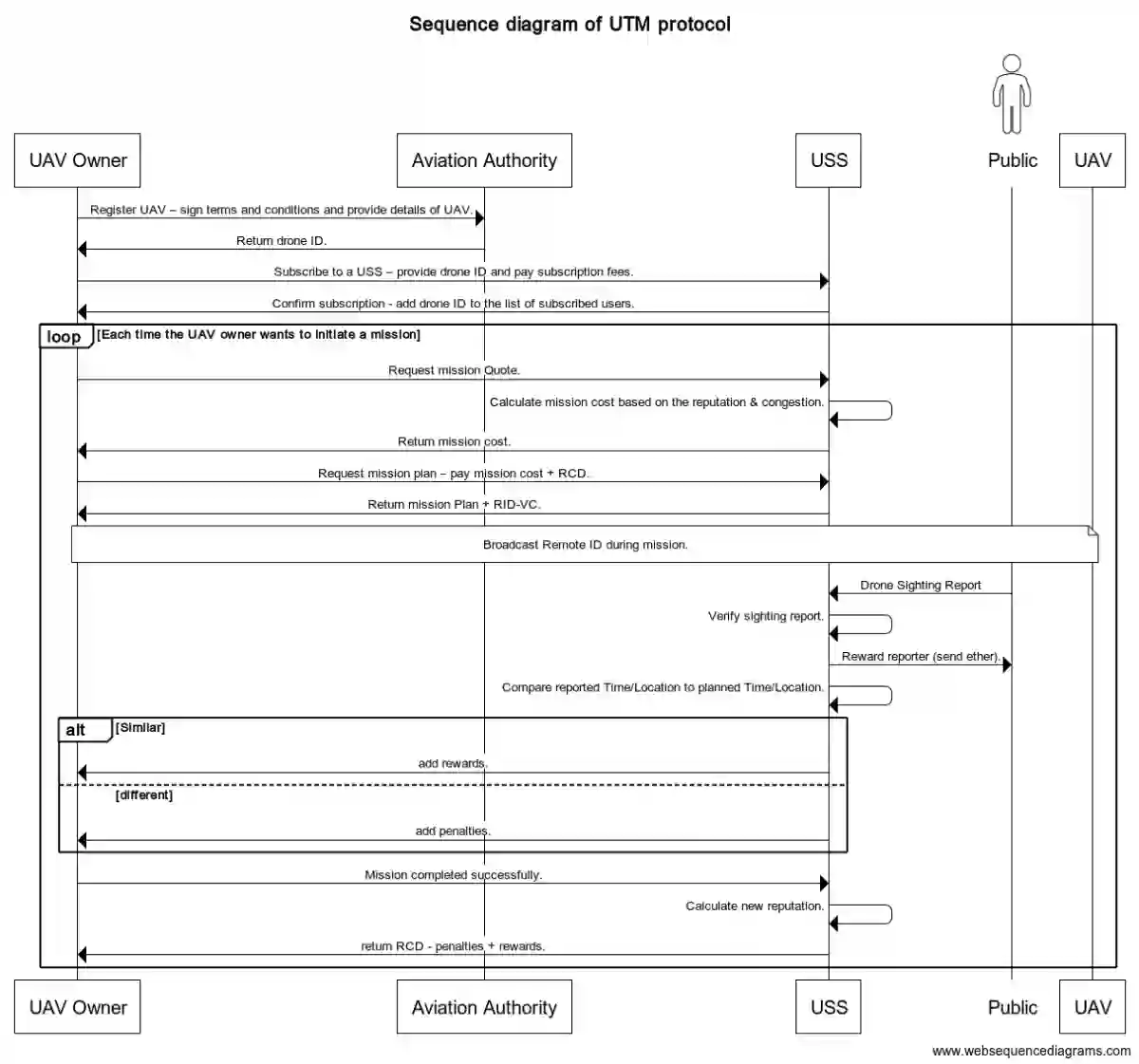
Unmanned aerial vehicles (UAVs) are gaining immense attention due to their potential to revolutionize various businesses and industries. However, the adoption of UAV-assisted applications will strongly rely on the provision of reliable systems that allow managing UAV operations at high levels of safety and security. Recently, the concept of UAV traffic management (UTM) has been introduced to support safe, efficient, and fair access to low-altitude airspace for commercial UAVs. A UTM system identifies multiple cooperating parties with different roles and levels of authority to provide real-time services to airspace users. However, current UTM systems are centralized and lack a clear definition of protocols that govern a secure interaction between authorities, service providers, and end-users. The lack of such protocols renders the UTM system unscalable and prone to various cyber attacks. Another limitation of the currently proposed UTM architecture is the absence of an efficient mechanism to enforce airspace rules and regulations. To address this issue, we propose a decentralized UTM protocol that controls access to airspace while ensuring high levels of integrity, availability, and confidentiality of airspace operations. To achieve this, we exploit key features of the blockchain and smart contract technologies. In addition, we employ a mobile crowdsensing (MCS) mechanism to seamlessly enforce airspace rules and regulations that govern the UAV operations. The solution is implemented on top of the Etheruem platform and verified using four different smart contract verification tools. We also provided a security and cost analysis of our solution. For reproducibility, we made our implementation publicly available on Github.
翻译:无人驾驶航空飞行器(无人驾驶飞行器)具有使各种企业和行业发生革命的潜力,因此日益受到高度关注。然而,无人驾驶航空器协助应用软件的采用将在很大程度上取决于提供可靠的系统,以便能够在高度安全保障下管理无人驾驶航空器的业务。最近,采用了无人驾驶航空器交通管理概念,以支持安全、高效和公平地进入商业无人驾驶航空器低空空域。无人驾驶航空器系统确定多个合作方,其作用和权力水平不同,可为空域用户提供实时服务。然而,目前无人驾驶航空器系统是中央化的,对管理当局、服务提供者和最终用户之间安全互动的协议缺乏明确的定义。由于缺乏这类协议,无人驾驶航空器系统无法伸缩,容易发生各种网络袭击。目前拟议的无人驾驶航空器架构的另一个局限性是缺乏执行空域规则和条例的有效机制。为解决这一问题,我们提议一个分散的无人驾驶航空器协议,以控制空域的准入解决方案,同时确保高度的诚信、可用性和保密性。此外,我们为实现这一目标,我们还利用了安全供应链和智能航空飞行器系统的主要特征,并运用了目前执行的空中安全控制工具。