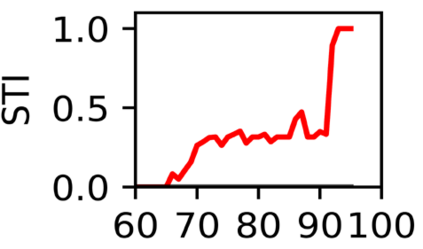
Despite the successful demonstration of autonomous vehicles (AVs), such as self-driving cars, ensuring AV safety remains a challenging task. Although some actors influence an AV's driving decisions more than others, current approaches pay equal attention to each actor on the road. An actor's influence on the AV's decision can be characterized in terms of its ability to decrease the number of safe navigational choices for the AV. In this work, we propose a safety threat indicator (STI) using counterfactual reasoning to estimate the importance of each actor on the road with respect to its influence on the AV's safety. We use this indicator to (i) characterize the existing real-world datasets to identify rare hazardous scenarios as well as the poor performance of existing controllers in such scenarios; and (ii) design an RL based safety mitigation controller to proactively mitigate the safety hazards those actors pose to the AV. Our approach reduces the accident rate for the state-of-the-art AV agent(s) in rare hazardous scenarios by more than 70%.
翻译:尽管成功地展示了自动驾驶车辆(如自行驾驶的汽车),但确保自动驾驶安全仍然是一个艰巨的任务。虽然一些行为者对自动驾驶决定的影响比其他行为者更大,但目前的做法对道路上的每个行为者都给予同等重视。一个行为者对自动驾驶决定的影响可以表现为它能够减少自动驾驶的安全航行选择的数量。在这项工作中,我们提出了一个安全威胁指标(STI),利用反事实推理来估计道路上每个行为者在对自动驾驶安全的影响方面的重要性。我们使用这一指标来(一) 描述现有的真实世界数据集,以确定罕见的危险情景以及在这种情况下现有控制器的不良性能;以及(二) 设计一个基于RL的安全减缓控制器,以积极主动地减轻这些行为者对自动驾驶安全风险。我们的方法将罕见危险情景中最先进的AV代理的事故发生率降低70%以上。