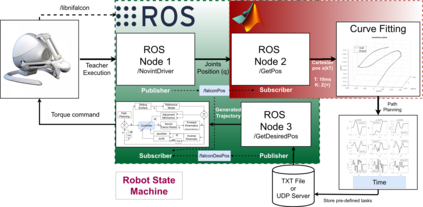
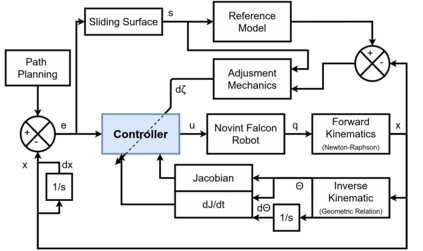
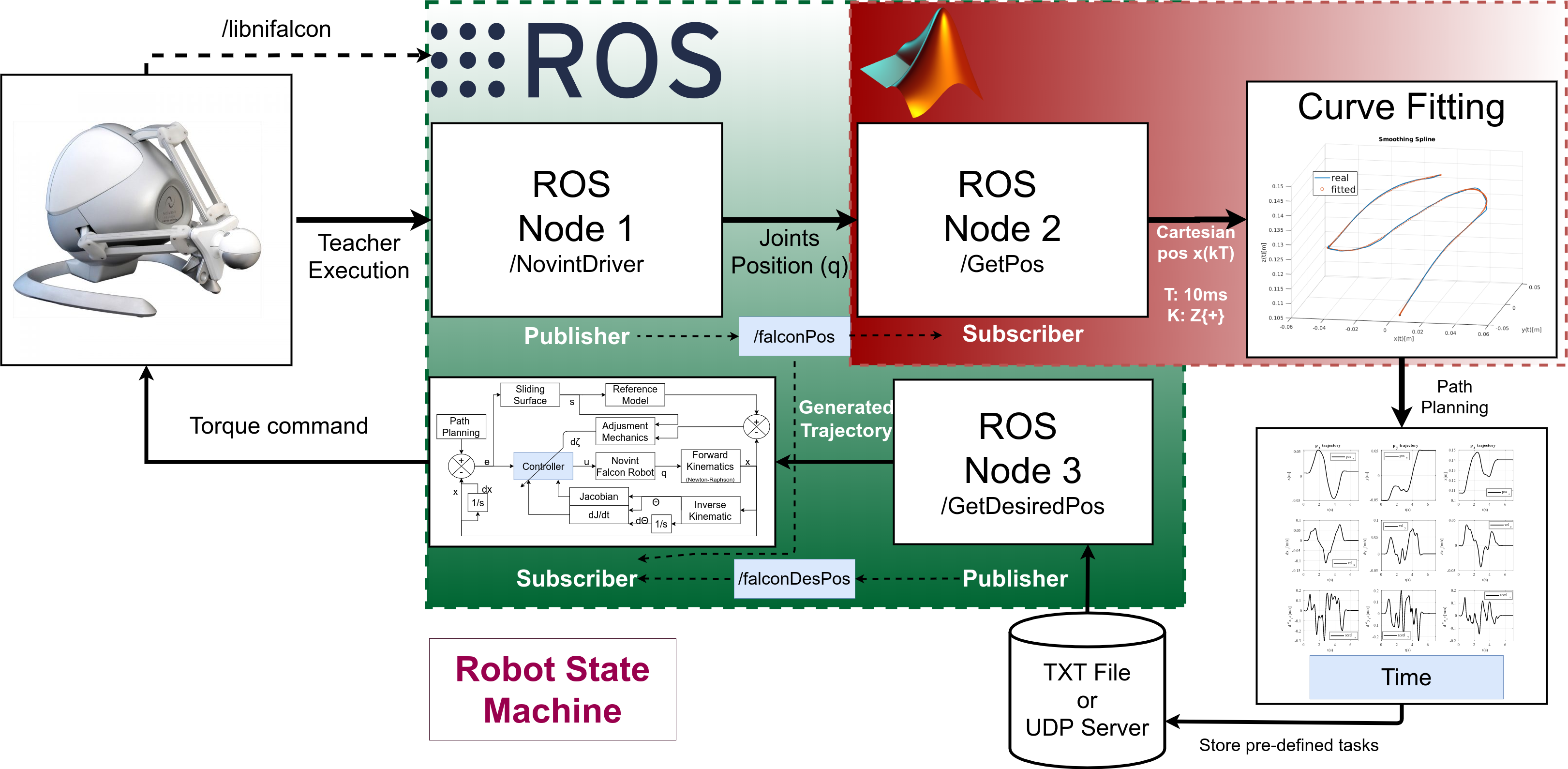
This paper presents a -- Learning from Demonstration -- method to perform robot movement trajectories that can be defined as you go. This way unstructured tasks can be performed, without the need to know exactly all the tasks and start and end positions beforehand. The long-term goal is for children with disabilities to be able to control a robot to manipulate toys in a play environment, and for a helper to demonstrate the desired trajectories as the play tasks change. A relatively inexpensive 3-DOF haptic device made by Novint is used to perform tasks where trajectories of the end-effector are demonstrated and reproduced. Under the condition where the end-effector carries different loads, conventional control systems possess the potential issue that they cannot compensate for the load variation effect. Adaptive tracking control can handle the above issue. Using the Lyapunov stability theory, a set of update laws are derived to give closed-loop stability with proper tracking performance.
翻译:本文介绍一个 -- -- 从演示中学习 -- -- 执行机器人运动轨迹的方法,可以按您去时的定义来定义。 这样可以完成非结构化的任务, 无需事先确切了解所有任务, 并开始和结束位置。 长期目标是让残疾儿童能够控制机器人在游戏环境中操纵玩具, 并且帮助者在游戏任务变化时展示想要的轨迹。 Novint 制作的相对廉价的 3 - DOF 突变装置用于执行显示和复制终端效应轨迹的任务。 在终端效应器携带不同负荷的条件下, 常规控制系统拥有他们无法补偿负荷变异效应的潜在问题。 适应性跟踪控制可以处理上述问题。 使用 Lyapunov 稳定性理论, 将产生一套更新法律, 使闭环功能稳定, 并有适当的跟踪性能 。