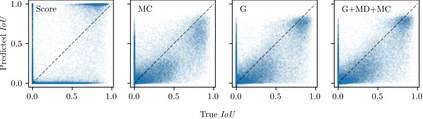
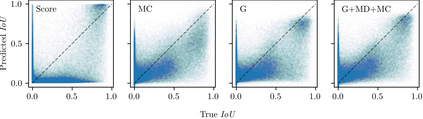
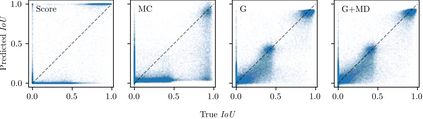
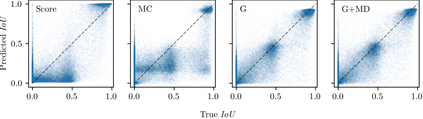
Reliable epistemic uncertainty estimation is an essential component for backend applications of deep object detectors in safety-critical environments. Modern network architectures tend to give poorly calibrated confidences with limited predictive power. Here, we introduce novel gradient-based uncertainty metrics and investigate them for different object detection architectures. Experiments on the MS COCO, PASCAL VOC and the KITTI dataset show significant improvements in true positive / false positive discrimination and prediction of intersection over union as compared to network confidence. We also find improvement over Monte-Carlo dropout uncertainty metrics and further significant boosts by aggregating different sources of uncertainty metrics.The resulting uncertainty models generate well-calibrated confidences in all instances. Furthermore, we implement our uncertainty quantification models into object detection pipelines as a means to discern true against false predictions, replacing the ordinary score-threshold-based decision rule. In our experiments, we achieve a significant boost in detection performance in terms of mean average precision. With respect to computational complexity, we find that computing gradient uncertainty metrics results in floating point operation counts similar to those of Monte-Carlo dropout.
翻译:可靠的隐性不确定性估算是安全临界环境中深物体探测器后端应用的一个必要组成部分。 现代网络结构往往会给错误校准的自信加上有限的预测力。 在这里, 我们引入新的基于梯度的不确定性度量, 并调查不同物体探测结构。 对 MS COCO、 PASAL VOC 和 KITTI 数据集的实验显示,与 网络信任 相比, 真实的正/ 假正偏差和联盟交叉性预测有了显著改善。 我们还发现, 蒙特卡洛 的辍学不确定性度量值和通过汇集不同不确定度量值来进一步大幅提升。 由此形成的不确定性度量值模型在各种情况下都产生了良好校准的信任度。 此外, 我们把不确定性量化模型应用到目标探测管道中, 以此来辨别错误预测的真实性, 取代普通的记分点决定规则。 在我们的实验中, 我们从平均精确度的角度大大提升了检测性。 关于计算复杂性, 我们发现, 计算梯度不确定度指标在浮动点操作中的结果与蒙特- Carlo 的计算结果相似 。