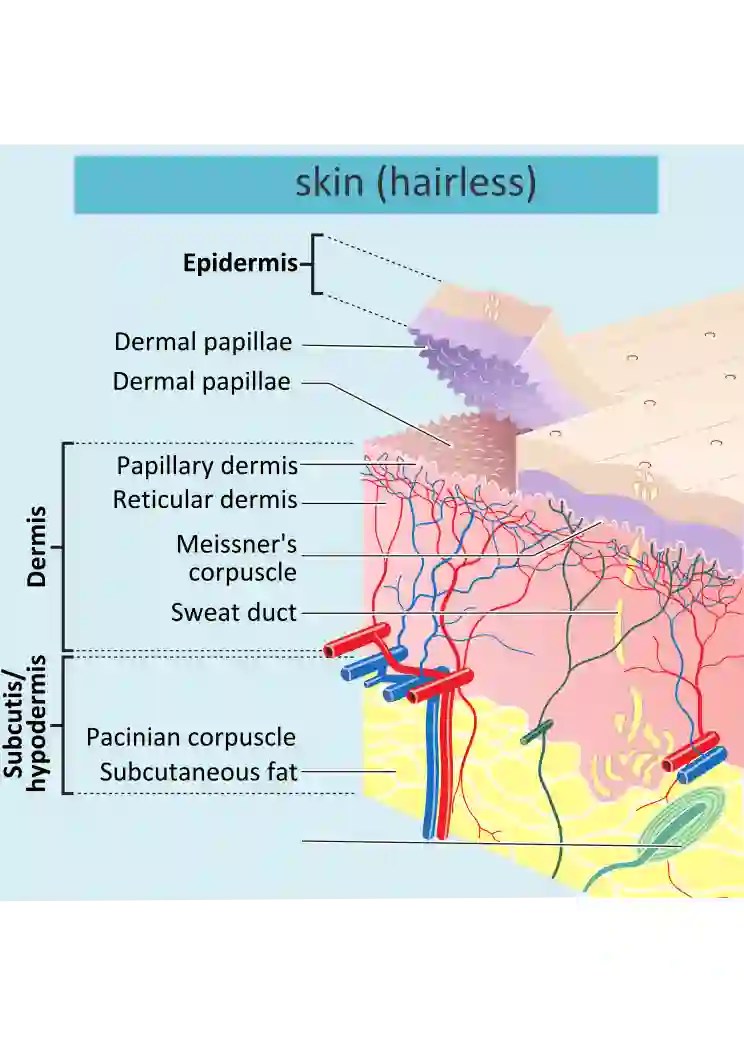
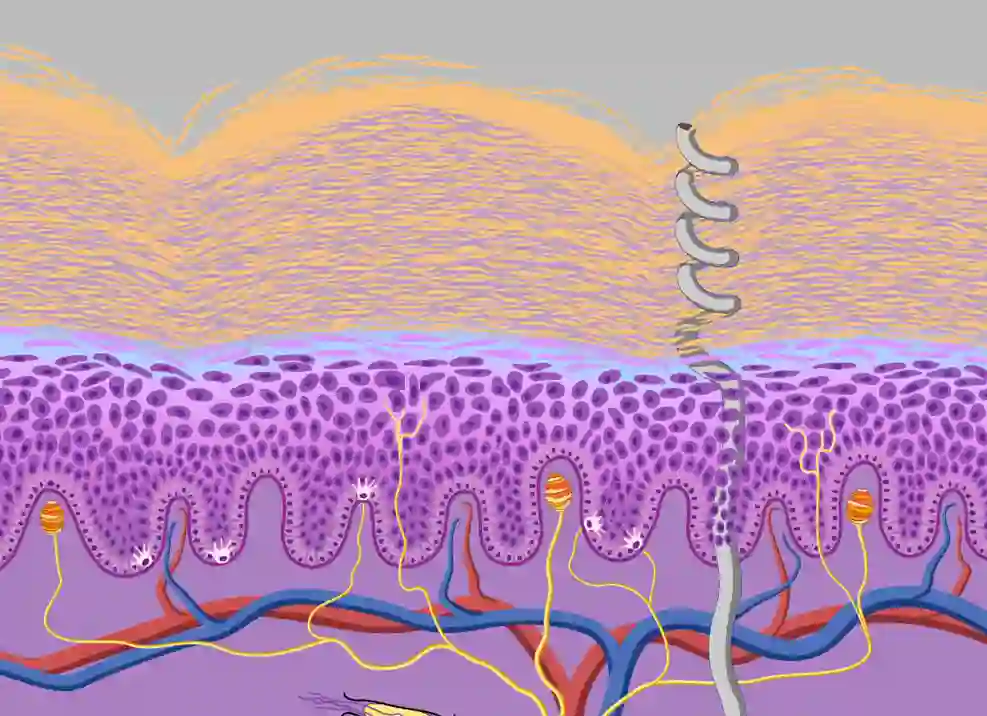
Reproducing the capabilities of the human sense of touch in machines is an important step in enabling robot manipulation to have the ease of human dexterity. A combination of robotic technologies will be needed, including soft robotics, biomimetics and the high-resolution sensing offered by optical tactile sensors. This combination is considered here as a SoftBOT (Soft Biomimetic Optical Tactile) sensor. This article reviews the BRL TacTip as a prototypical example of such a sensor. Topics include the relation between artificial skin morphology and the transduction principles of human touch, the nature and benefits of tactile shear sensing, 3D printing for fabrication and integration into robot hands, the application of AI to tactile perception and control, and the recent step-change in capabilities due to deep learning. This review consolidates those advances from the past decade to indicate a path for robots to reach human-like dexterity.
翻译:复制人体在机器中的触摸感的能力是使机器人操作能够方便人类变异性的一个重要步骤。 需要将机器人技术结合起来, 包括软机器人、生物感应器和光学触觉传感器提供的高分辨率感应。 此组合在此被视为软BOT( 软生物模拟光学触觉感应器) 传感器。 此文章将 BRL TacTip 评为这种传感器的原型示例。 主题包括人造皮肤形态学与人类感应的感应原理之间的关系、 触摸剪感的性质与好处、 为制造和融入机器人手而打印3D、 AI 用于触觉感应和控制以及最近因深层次学习而逐步改变的能力。 本审查整合了过去十年的这些进展, 以指出机器人达到人类感应感应的途径 。