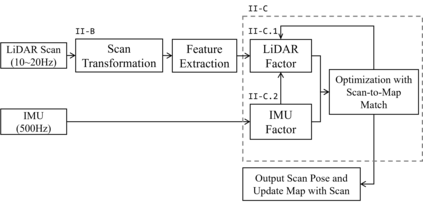
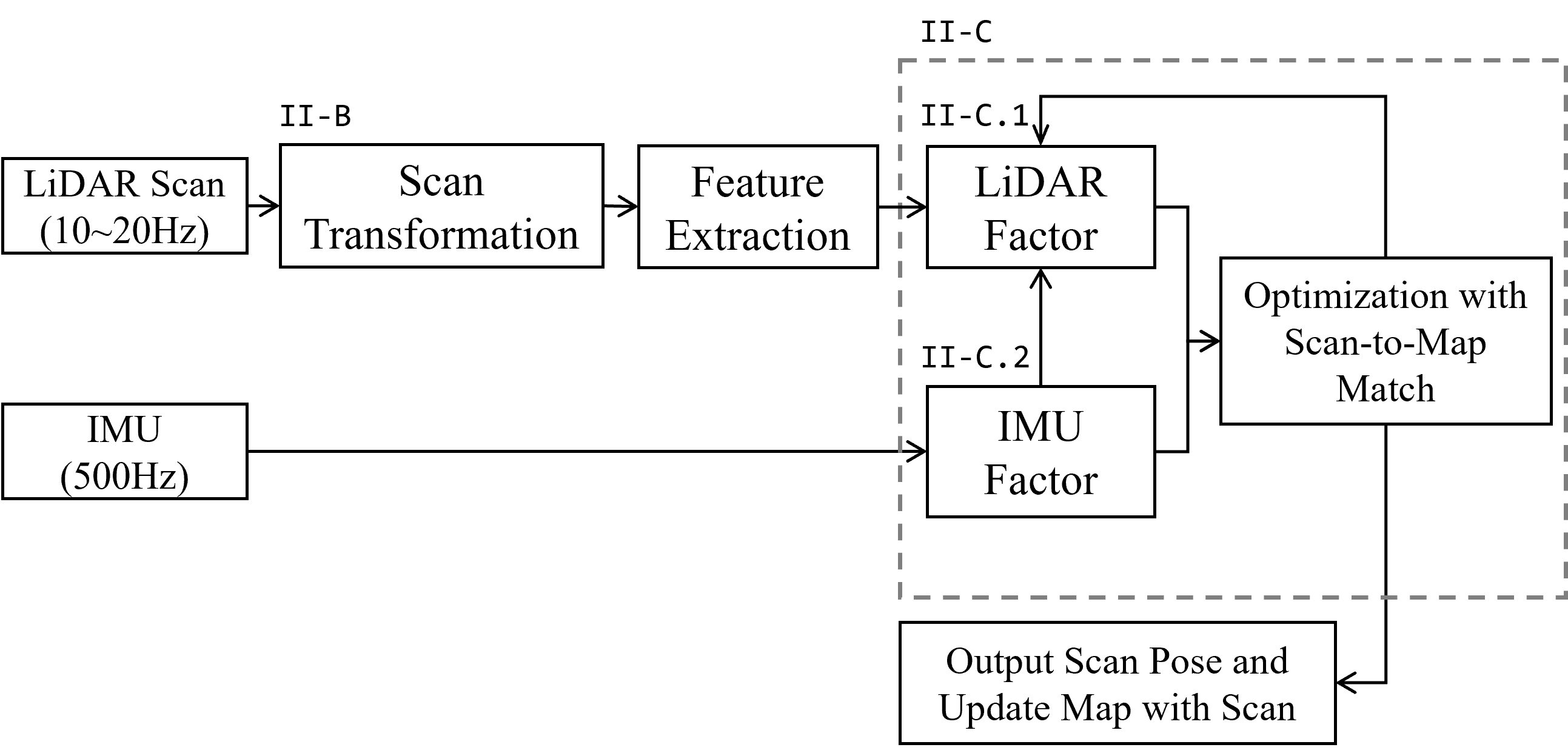
Scan undistortion is a key module for LiDAR odometry in high dynamic environment with high rotation and translation speed. The existing line of studies mostly focuses on one pass undistortion, which means undistortion for each point is conducted only once in the whole LiDAR-IMU odometry pipeline. In this paper, we propose an optimization based tightly coupled LiDAR-IMU odometry addressing iterated point-level undistortion. By jointly minimizing the cost derived from LiDAR and IMU measurements, our LiDAR-IMU odometry method performs more accurate and robust in high dynamic environment. Besides, the method characters good computation efficiency by limiting the quantity of parameters.
翻译:扫描不扭曲是高动态环境中高旋转和翻译速度的LiDAR odadorization的关键模块。 现有的研究大都集中在一次不扭曲上, 这意味着在整个LiDAR- IMU odorization管道中,每个点的不扭曲只进行一次。 在本文中, 我们建议基于紧密结合的LiDAR- IMU odorization的优化, 解决点水平不扭曲。 通过联合尽量减少LIDAR 和IMU 测量得出的成本, 我们的LIDAR- IMU odorization方法在高动态环境中表现更加准确和有力。 此外, 方法通过限制参数数量来显示良好的计算效率 。