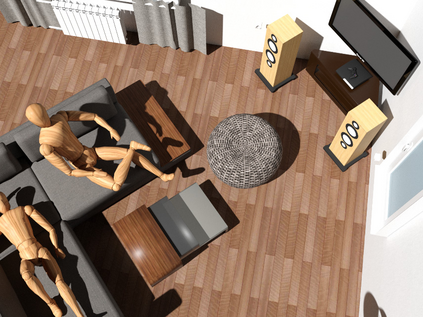
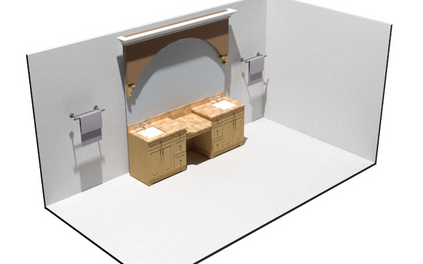
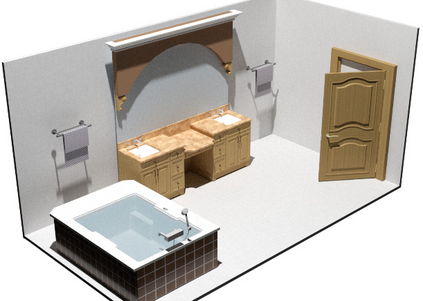
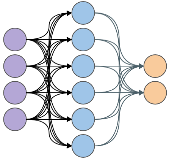
In this paper we propose a neural message passing approach to augment an input 3D indoor scene with new objects matching their surroundings. Given an input, potentially incomplete, 3D scene and a query location, our method predicts a probability distribution over object types that fit well in that location. Our distribution is predicted though passing learned messages in a dense graph whose nodes represent objects in the input scene and edges represent spatial and structural relationships. By weighting messages through an attention mechanism, our method learns to focus on the most relevant surrounding scene context to predict new scene objects. We found that our method significantly outperforms state-of-the-art approaches in terms of correctly predicting objects missing in a scene based on our experiments in the SUNCG dataset. We also demonstrate other applications of our method, including context-based 3D object recognition and iterative scene generation.
翻译:在本文中,我们提出了一个神经信息传递方法,用与其周围环境相匹配的新对象来增加输入 3D 室内场景。在输入可能不完整、3D 场景和查询位置的情况下,我们的方法预测了与该位置相匹配的物体类型的概率分布。我们通过在密集的图形中传递学到的信息来预测我们的分布,该图形中的节点代表了输入场景中的物体,边缘代表了空间和结构关系。通过关注机制对信息进行加权,我们的方法学会关注最相关的周围场景背景,以预测新的场景物体。我们发现,我们的方法在正确预测一个场景中失踪的物体方面,大大优于基于我们在SUNCG数据集中的实验的先进方法。我们还展示了我们方法的其他应用,包括基于上下文的3D 对象识别和互动场景生成。