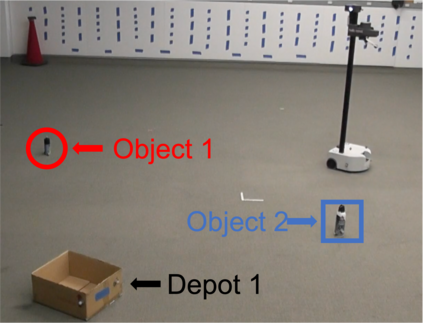
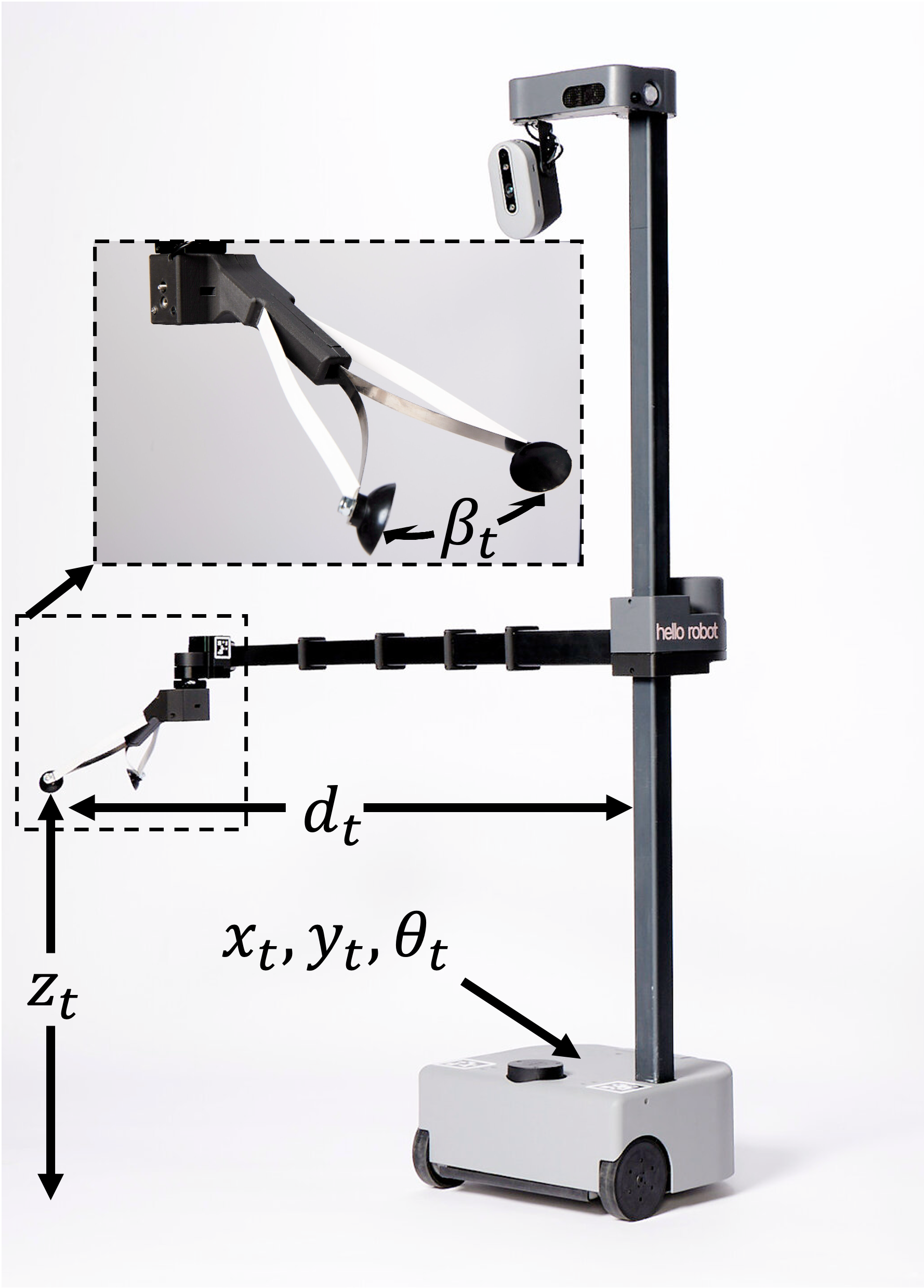
In this paper we present a grammar and control synthesis framework for online modification of Event-based Signal Temporal Logic (STL) specifications, during execution. These modifications allow a user to change the robots' task in response to potential future violations, changes to the environment, or user-defined task design changes. In cases where a modification is not possible, we provide feedback to the user and suggest alternative modifications. We demonstrate our task modification process using a Hello Robot Stretch satisfying an Event-based STL specification.
翻译:在本文中,我们提出了一个语法和控制综合框架,用于在线修改事件驱动信号时间逻辑(STL)规范。这些修改允许用户根据可能发生的未来违规情况、环境变化或用户定义的任务设计变化来更改机器人的任务。在无法进行修改的情况下,我们向用户提供反馈并建议替代修改。我们使用一个能够满足事件驱动STL规范的Hello Robot Stretch演示了我们的任务修改过程。