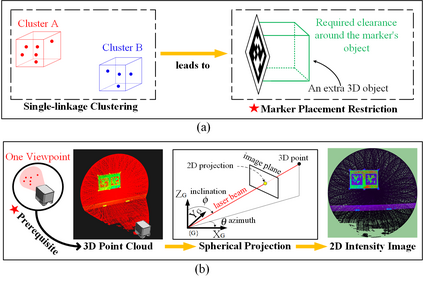
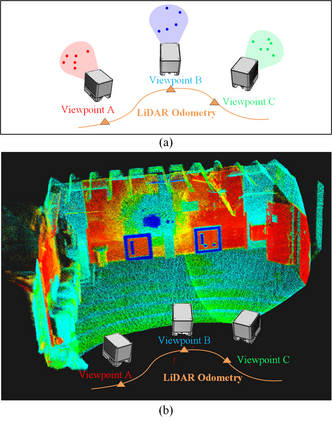
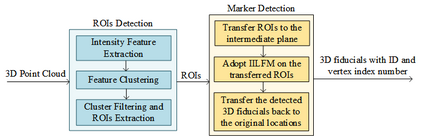
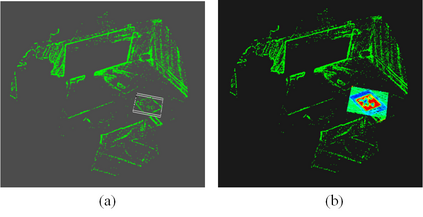
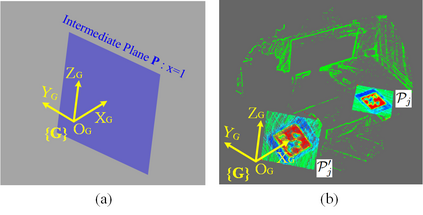
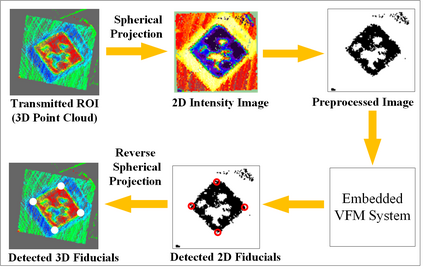
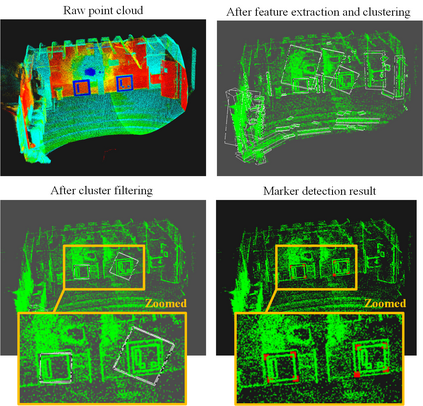
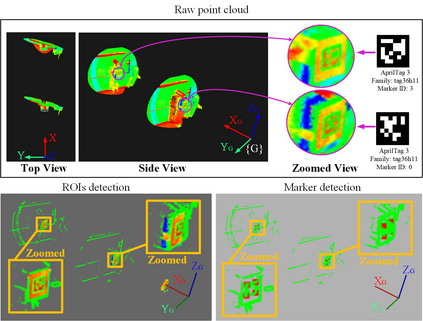
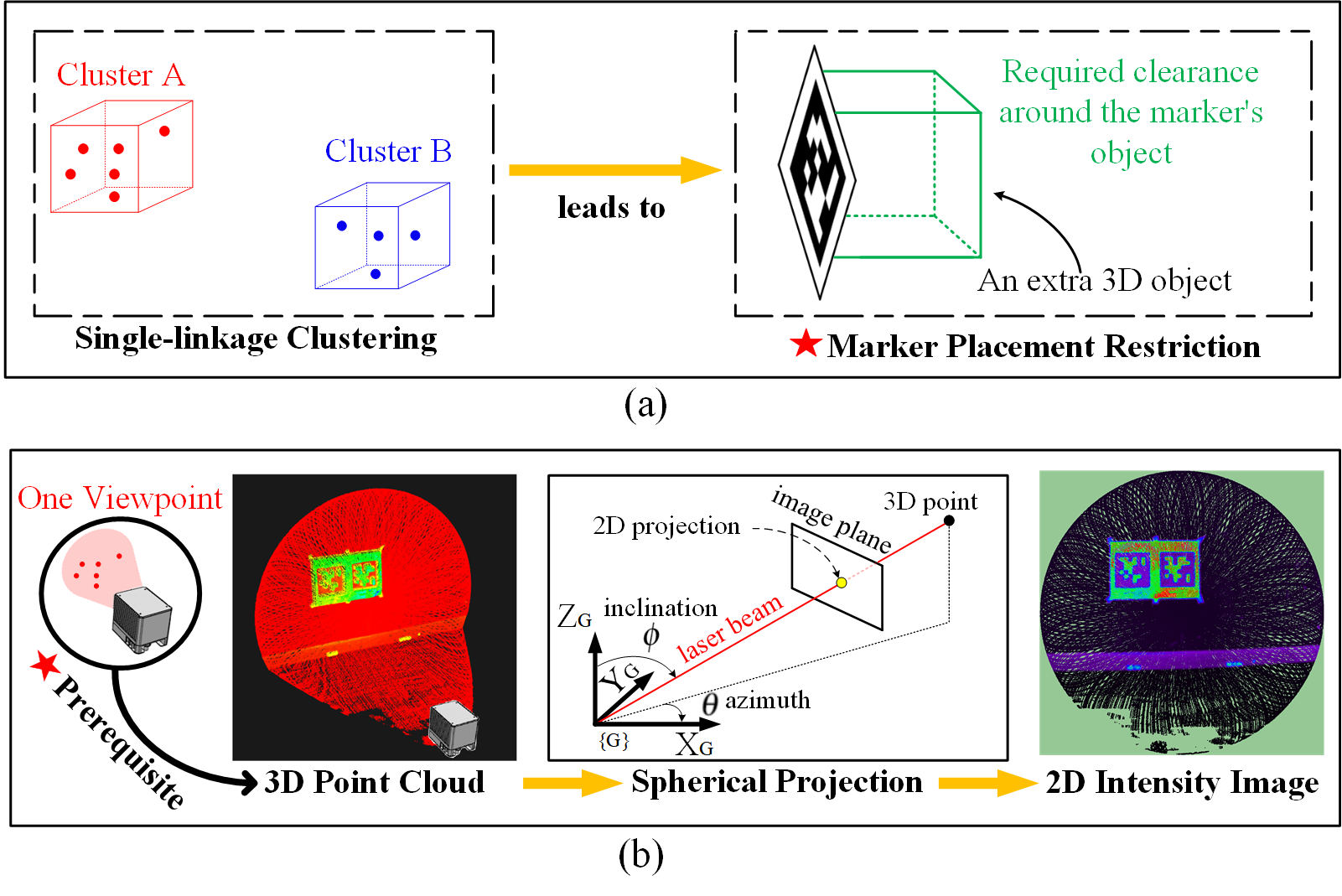
The existing LiDAR fiducial marker systems have usage restrictions. Especially, LiDARTag requires a specific marker placement and Intensity Image-based LiDAR Fiducial Marker demands that the point cloud is sampled from one viewpoint. As a result, with point clouds sampled from multiple viewpoints, fiducial marker detection remains an unsolved problem. In this letter, we develop a novel algorithm to detect the fiducial markers in the multi-viewpoint point cloud. The proposed algorithm includes two stages. First, Regions of Interest (ROIs) detection finds point clusters that could contain fiducial markers. Specifically, a method extracting the ROIs from the intensity perspective is introduced on account of the fact that from the spatial perspective, the markers, which are sheets of paper or thin boards, are non-distinguishable from the planes to which they are attached. Second, marker detection verifies if the candidate ROIs contain fiducial markers and outputs the ID numbers and vertices locations of the markers in the valid ROIs. In particular, the ROIs are transmitted to a predefined intermediate plane for the purpose of adopting a spherical projection to generate the intensity image, and then, marker detection is completed through the intensity image. Qualitative and quantitative experimental results are provided to validate the proposed algorithm. The codes and results are available at: https://github.com/York-SDCNLab/Marker?Detection-General
翻译:特别是, LiDAR 现有的LiDAR 标志系统有使用限制。 特别是, LiDARDARTag 要求一个特定的标记位置和强度图像标记群, 以 LiDAR 显示显示显示显示点云从一个角度进行取样。 因此, 通过从多个角度取样点云云, 运动标记探测仍然是一个无法解决的问题。 在本信中, 我们开发了一个新奇的算法, 以检测多视点云中的教育标记。 提议的算法包括两个阶段 。 首先, 利益区域( ROIs) 检测发现点群群中可能包含显示的标记。 具体地说, 从强度角度提取ROIs的方法是引入的。 由于从空间角度来看, 点云云是纸板或薄板的表, 其检测仍无法从上面的平面上分解开来。 其次, 标记检测功能验证候选的ROI( ROI) 发现点和垂直标记点的位置。 具体地说, ROIS被传输到一个从强度角度的中间平面图像, 提供精确的深度测量结果 。 。 质量 。 质量 质量 。 质量 。 通过 和 质量 质量 质量, 质量 质量 的检验结果 提供 质量 质量, 质量 质量 质量 质量 和 质量, 质量 质量 质量 质量 质量 质量 质量, 的 的 的 质量 质量 的 的, 质量 质量 质量 质量 质量 质量 质量 和 的 的 的 的 和 质量 的 的 的 的 的 质量 质量 和 的 的 的 的 质量 质量 的 的 的 的 的 质量 的 的 的 的 的 的 的 的 的 的 的 和 的 的 的 的 的 的 和 的 的 的 的 和 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 的 和 的 的 的 的 的 的 的 的 的