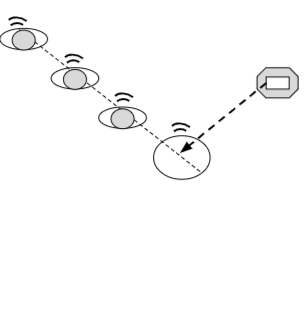
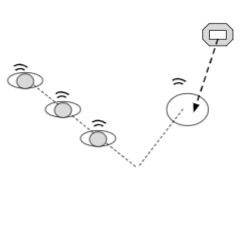
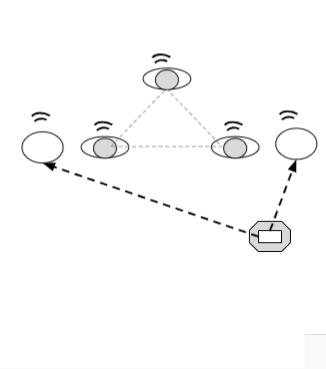
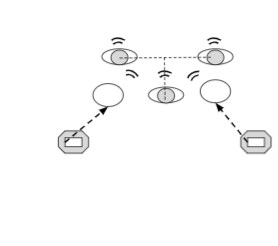
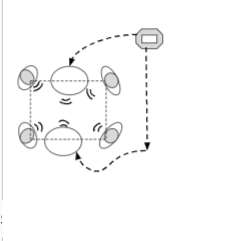
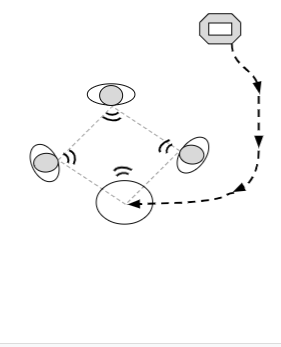
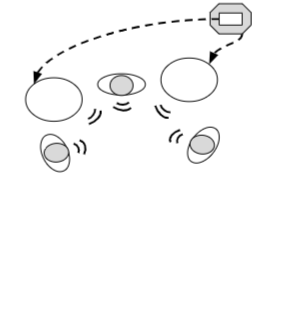
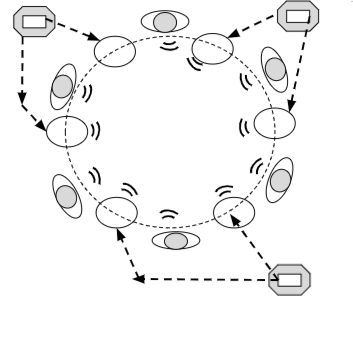
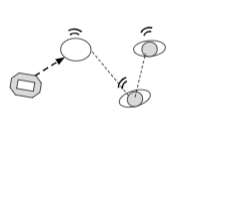
Robots in our daily surroundings are increasing day by day. Their usability and acceptability largely depend on their explicit and implicit interaction capability with fellow human beings. As a result, social behavior is one of the most sought-after qualities that a robot can possess. However, there is no specific aspect and/or feature that defines socially acceptable behavior and it largely depends on the situation, application, and society. In this article, we investigate one such social behavior for collocated robots. Imagine a group of people is interacting with each other and we want to join the group. We as human beings do it in a socially acceptable manner, i.e., within the group, we do position ourselves in such a way that we can participate in the group activity without disturbing/obstructing anybody. To possess such a quality, first, a robot needs to determine the formation of the group and then determine a position for itself, which we humans do implicitly. The theory of f-formation can be utilized for this purpose. As the types of formations can be very diverse, detecting the social groups is not a trivial task. In this article, we provide a comprehensive survey of the existing work on social interaction and group detection using f-formation for robotics and other applications. We also put forward a novel holistic survey framework combining all the possible concerns and modules relevant to this problem. We define taxonomies based on methods, camera views, datasets, detection capabilities and scale, evaluation approaches, and application areas. We discuss certain open challenges and limitations in current literature along with possible future research directions based on this framework. In particular, we discuss the existing methods/techniques and their relative merits and demerits, applications, and provide a set of unsolved but relevant problems in this domain.
翻译:我们日常环境中的机器人正在日复一日地增加。 它们的可用性和可接受性主要取决于它们与人类同胞之间的明确和隐含的互动能力。 因此, 社会行为是机器人能够拥有的最需要追求的品质之一。 但是, 没有一个具体的方面和/ 或特征来定义社会可接受的行为, 它在很大程度上取决于环境、 应用和社会。 在本篇文章中, 我们调查合用机器人的这种社会行为。 想象一群人彼此互动, 我们想要加入这个团体。 我们作为人类以社会可接受的方式, 也就是说, 在团体内, 我们确实将自己的方向定位于一种我们可以参与团体活动的方式, 而不会干扰/ 破坏任何人。 但是, 没有一个具体的方面和特点, 社会行为, 首先, 一个机器人需要决定这个团体的构成, 然后决定自己所处的位置, 而我们人类是隐含着的。 可以为此使用变形理论的理论。 由于形成的形式可能非常多样化, 检测社会团体并不是一个微不足道的任务。 在文章中, 我们用一个全面的调查方式, 并且用新的方法, 我们用新的方法, 来解释现有的研究