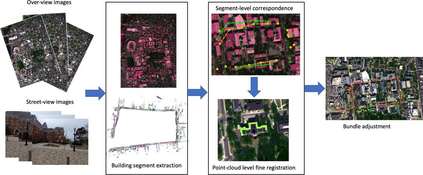
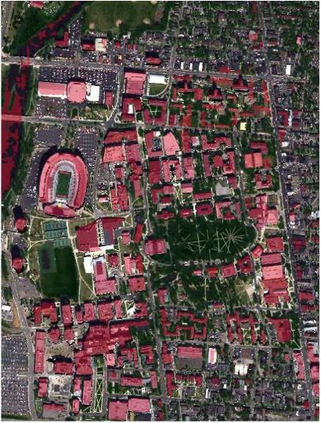
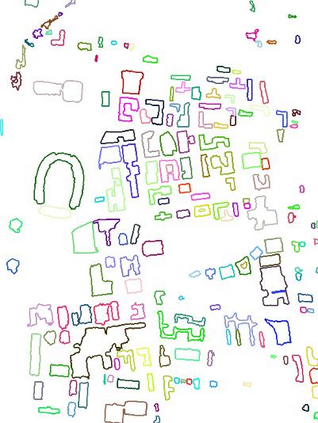
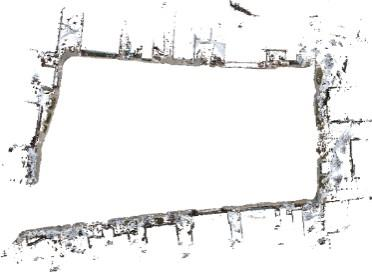
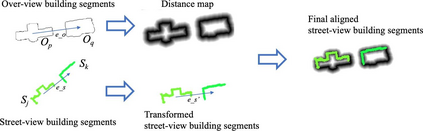
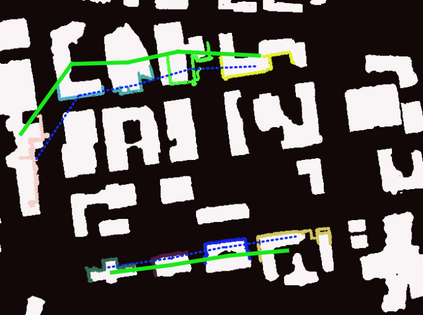
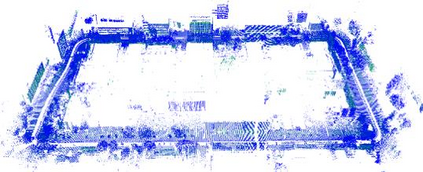
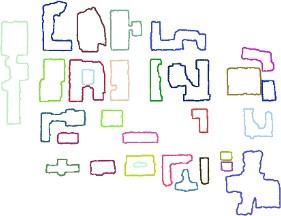
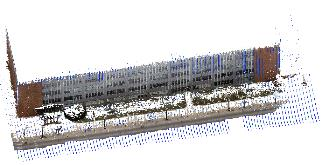
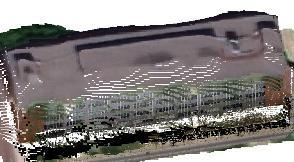
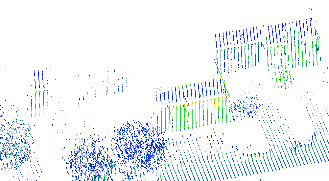
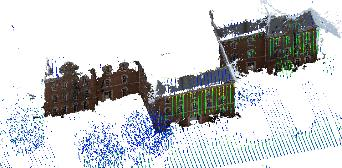
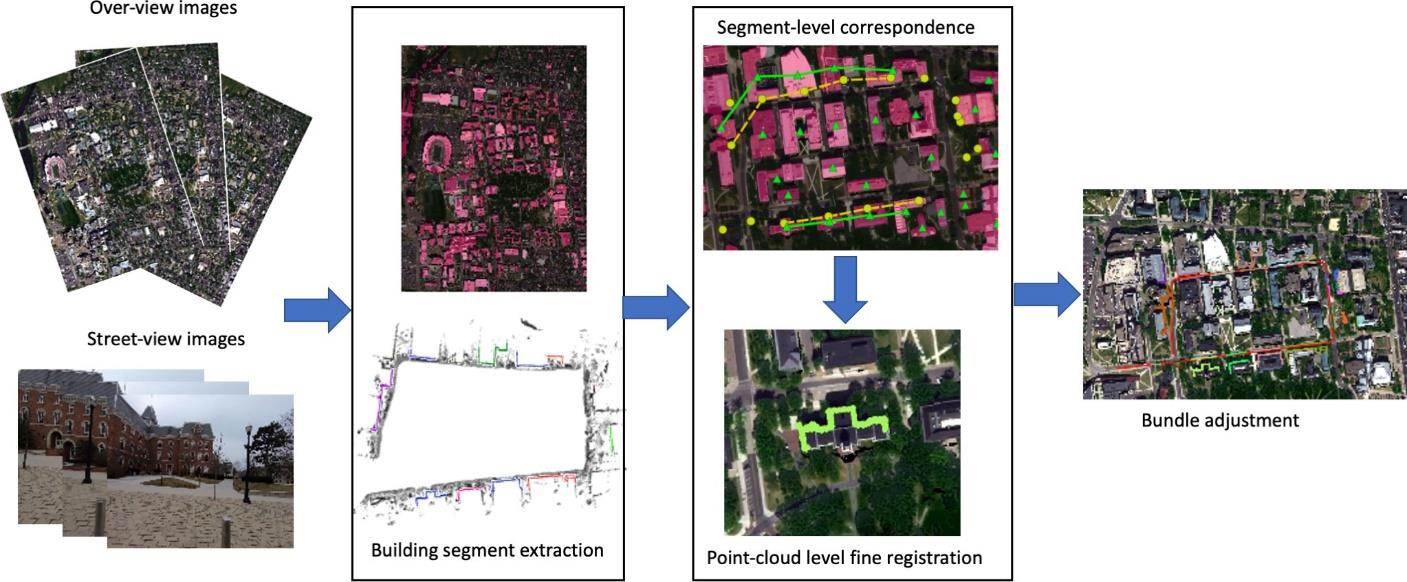
In this paper, based on the assumption that the object boundaries (e.g., buildings) from the over-view data should coincide with footprints of fa\c{c}ade 3D points generated from street-view photogrammetric images, we aim to address this problem by proposing a fully automated geo-registration method for cross-view data, which utilizes semantically segmented object boundaries as view-invariant features under a global optimization framework through graph-matching: taking the over-view point clouds generated from stereo/multi-stereo satellite images and the street-view point clouds generated from monocular video images as the inputs, the proposed method models segments of buildings as nodes of graphs, both detected from the satellite-based and street-view based point clouds, thus to form the registration as a graph-matching problem to allow non-rigid matches; to enable a robust solution and fully utilize the topological relations between these segments, we propose to address the graph-matching problem on its conjugate graph solved through a belief-propagation algorithm. The matched nodes will be subject to a further optimization to allow precise-registration, followed by a constrained bundle adjustment on the street-view image to keep 2D29 3D consistencies, which yields well-registered street-view images and point clouds to the satellite point clouds.
翻译:在本文中,基于以下假设,即超视层数据产生的物体边界(如建筑物)应当与从街景摄影图象中生成的3D点的足迹相吻合的假设,我们的目标是解决这一问题,为此提出一个全自动化的交叉视图数据地理登记方法,该方法利用地震分割的物体边界作为全球优化框架下的视异性特征,通过图形匹配:将来自立体/多立体卫星图像和从单镜图像产生的街景点云作为投入,拟议的方法模型部分作为图表节点,从基于卫星的点云和基于街道的点云中探测,从而形成一个完全自动化的交叉视图数据地理登记方法,以便允许非固态匹配;为了实现一个强有力的解决方案,并充分利用这些部分之间的表面关系,我们提议通过一个信仰和反调算法来解决其同级图中产生的图形匹配问题。 相匹配的街道节点将进一步进行优化,允许将基于卫星定位点和基于街景点的建筑图层进行精确登记,随后是2-D级图像进行压缩的升级。