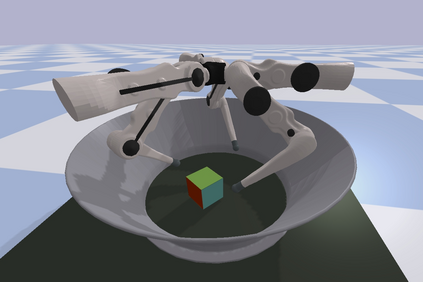
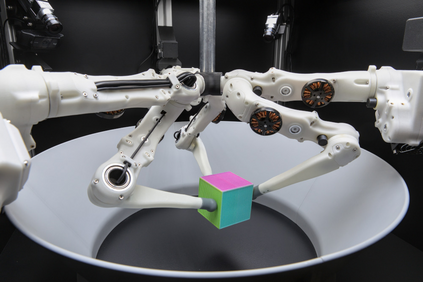
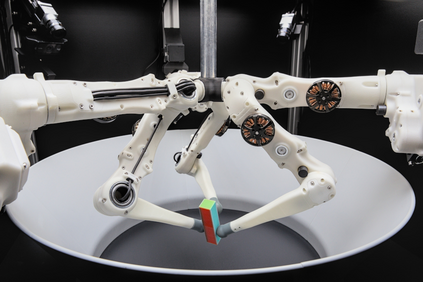
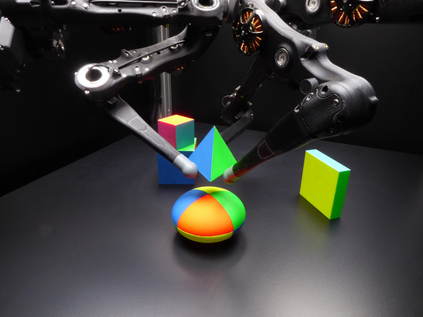
Dexterous manipulation remains an open problem in robotics. To coordinate efforts of the research community towards tackling this problem, we propose a shared benchmark. We designed and built robotic platforms that are hosted at MPI for Intelligent Systems and can be accessed remotely. Each platform consists of three robotic fingers that are capable of dexterous object manipulation. Users are able to control the platforms remotely by submitting code that is executed automatically, akin to a computational cluster. Using this setup, i) we host robotics competitions, where teams from anywhere in the world access our platforms to tackle challenging tasks ii) we publish the datasets collected during these competitions (consisting of hundreds of robot hours), and iii) we give researchers access to these platforms for their own projects.
翻译:为协调研究界为解决这一问题所做的努力,我们提议了一个共同的基准。我们设计和建造了机器人平台,这些平台由智能系统MPI托管,可以远程访问。每个平台由三根机器人手指组成,能够操作极具活力的物体。用户可以通过提交自动执行的代码来远程控制平台,类似于计算组。利用这一设置,我们主办机器人竞赛,来自世界任何地方的团队利用平台应对具有挑战性的任务。 (二)我们公布这些竞赛期间收集的数据集(由数百个机器人小时组成),以及(三)我们让研究人员为自己的项目访问这些平台。