传统的泵和压缩机是由包括叶轮、轴承和电动机构成的庞大刚性系统。在工作的过程中,它们不仅需要润滑还极易产生噪音,就连基于压电执行器或电泳的微型泵也无不例外。电动柔性、可伸缩泵的缺乏阻碍了流体驱动软体系的多方面应用,例如机器人和机电一体化(致动器和传感器)、生物学(细胞培养的微流体)和可穿戴设备(热量分配)等。
![]()
近日,洛桑联邦理工大学软测量实验室 Herbert Shea教授和Vito Cacucciolo博士后开发了一台带有嵌入式柔性电极完全软的泵。该泵重量仅为1.0 g,可通过模块化泵元件(75 mm×19 mm×1.3 mm,流体通道尺寸为55 mm× 2 mm×0.5 mm)组成,没有活动部件,在工作时静音且不产生振动。此外,通过简单的调整电场就可对液体的流速进行掌控。最后,研究人员分别将可伸缩泵集成于纺织手套、嵌入软弯曲结构,展示了其在可穿戴、软机器人等领域的应用价值。
那么这种可伸缩泵的工作原理是什么呢?
其实,在这种泵的流体通道里充满了介电液体。
当施加电压时,电子从电极跳跃到液体,使得一些分子带电。
而这些分子易被吸引到其他电极上,致使剩余流体的运动。
具体的机理主要有以下两种:
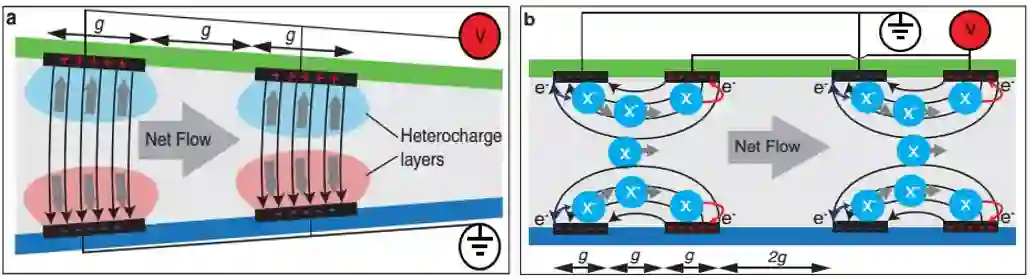
a. 带有倾斜电容器的传导泵。
首先在电极附近形成杂化电荷层,这些层相对于最近的电极具有更高浓度的相反极性离子。
然后,这些离子会被吸引到最近的电极并在那放电,导致电极表面电场流入,使得液体在具有倾斜几何形状的电容器中流动。
b. 带有交叉电极的电荷注入。
当电场足够高以克服能垒时,导致场发射,电子从阴极隧穿到介电液体中。
产生的离子被电场加速,直到它们在阳极放电,沿途传递动量到中性液体分子。
两种不同几何形状的电极和相应的电流体动力学(EHD)机制
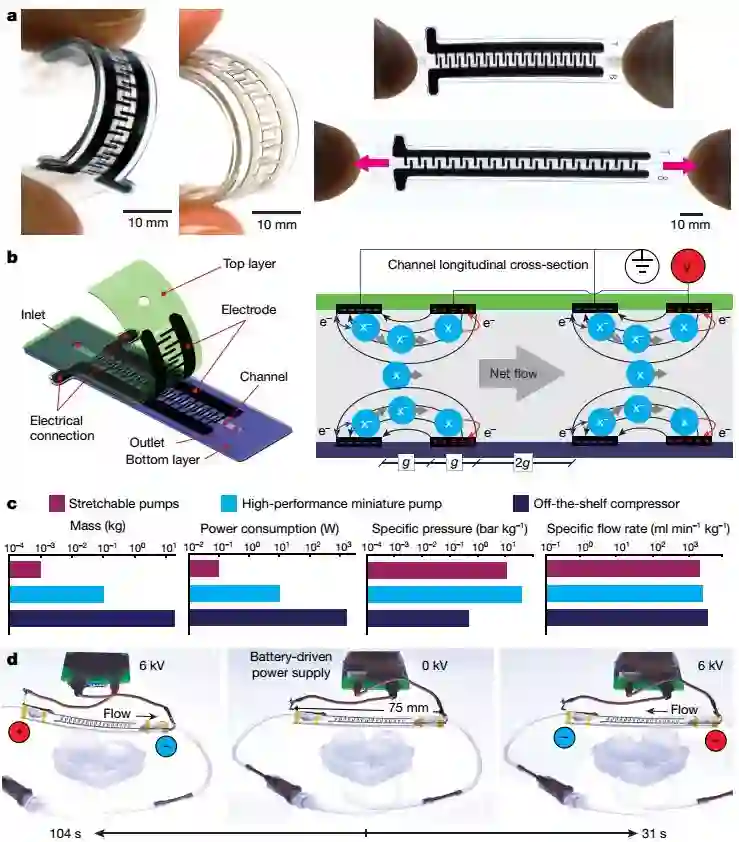
a.由碳(左)和银电极(中间)制成的泵被弯曲,碳泵(右)被拉伸50%。
b. 可伸缩泵的示意图(左)。
顶层和底层是厚度为0.4mm的PDMS膜,其上图案化30μm厚的柔性电极。
通道是激光切割的0.5毫米厚的PDMS层。
泵的工作原理(右)。
顶部电极和底部电极都是相互交叉的。
相反极性的指状物之间的间隙g为0.5mm,指状物对之间的间隔为1mm。
通道充满介电液体。
当施加的电场超过5-8 Vμm-1的阈值时,电子从阴极隧穿到液体中。
产生的离子(X-)被电场加速,直到它们在阳极放电,沿着它们的路径拖动中性液体,从而导致流体流动。
c. 可伸缩泵,微型泵(TCS Micropumps,MGD 1000S)和现成的压缩机(McMaster,单罐便携式空气压缩机)之间的性能比较。
d. 利用压缩泵演示心形气球两个心室间液体的移动。
通过改变施加电压的极性,可以反转流动方向。
泵由20 g,6 kV的电池供电。
经过31秒,液体可以从左心室送到右心室;
通过104秒又可从右送到左。
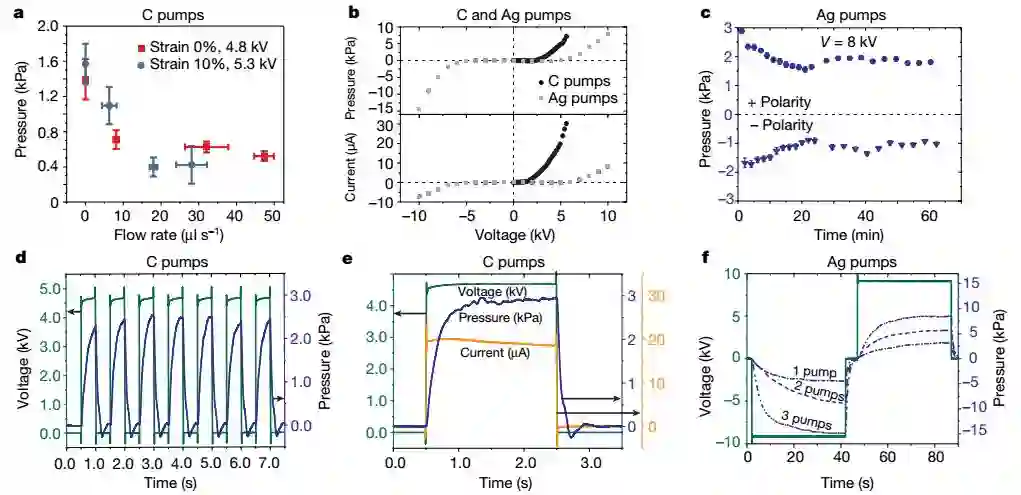
a.碳泵在0%和10%应变下的压力与流速的关系。
在10%应变下电压增加10%,以保持与0%应变相同的电场。
b. 碳和Ag泵的零流量(输出阀关闭)的压力和电流与施加电压的关系。
对于Ag泵,可以通过反转所施加电压的极性来反转流动方向。
c. 对Ag泵进行寿命测试,施加±8 kV方波1小时。
d. 碳泵响应1 Hz方波振幅0-4.7 kV产生的压力。
e. 碳泵对4.5kV电压阶跃的瞬态响应,显示压力上升时间为0.4s,下降时间为0.14s,均为10%至90%压力。
f. 当一个,两个或所有三个泵启动时,三个泵串联连接产生的压力。
对于代表一个泵和两个泵的曲线,显示的数据是三次实验的平均值,以便包括来自所有三个设备的数据。
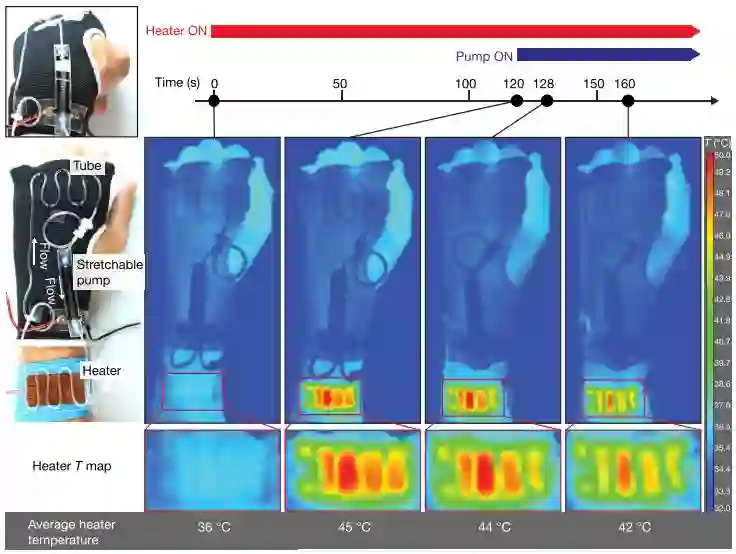
闭环流体回路包括泵和缝在纺织手套(“冷”侧)中的蛇形柔性管,以及粘合到柔性加热器(“热”侧)的蛇形柔性管。
当泵运行时,佩戴者可以容易地弯曲手腕。
泵使流体从加热器循环到手套,然后返回到另一侧。
红外图像中的颜色对应于温度图(参见最右边的颜色条)。
最左边的红外图像显示加热器和泵都关闭时的初始状态。
对于第二个红外图像,加热器打开,泵关闭:
加热器的温度远高于臂的温度。
泵启动几秒钟后拍摄第三张红外照片。
人们可以看到冷液从右管进入“热”回路,热量从左管传出。
最右边的红外图像显示,在40秒的流体循环后,加热器的温度降低。
软泵的温度不变确认了其可忽略不计的热量产生。
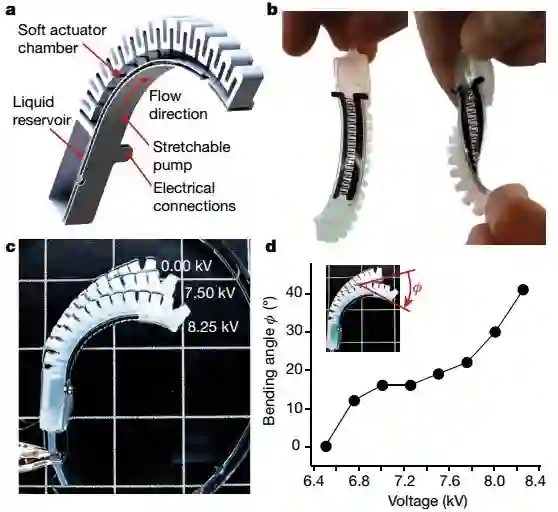
图4. 将可伸缩泵与弯曲流体制动器结合制备流体肌肉。
a.流体肌肉的纵向横截面示意图,显示主要成分。
泵的入口与致动器底部的小容器相连,而出口与波纹管形弯曲室(软致动器室)相连。
b. 整个执行器柔软,容易变形。
c. 一旦预先填充介电液体,执行器就没有任何外部管道。
当施加电压时它会弯曲:
软泵将液体从储液器移动到弯曲室,从而产生变形。
d. 测量的弯曲角度与施加电压的函数。
该文章内容转载自 高分子科学前沿,如有侵权请联系删除
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!