也谈自动驾驶高精地图
日前,自动驾驶巨头Waymo开始在凤凰城募集无人驾驶车辆的乘客,加州也终于出台允许无司机的自动驾驶车辆上路测试的法规。行业巨头的动向和开放的政府政策使得硅谷自动驾驶领域越发生机勃勃。作为自动驾驶不可或缺的数字化基建模块,自动驾驶高精地图近日被Bloomberg和Financial Times频频提起,我们今天也来谈谈自动驾驶高精地图。
高精地图虽然在自动驾驶时代被推上了舞台中央,但它其实并不是一个新词。在辅助驾驶(ADAS)时代,具有详细路况信息和拓扑关系的矢量地图就被称为高精地图。Bloomberg和Financial Times提名的全球多家大小地图公司中,所指的“高精地图”的概念也不尽相同—有的指的是矢量地图,有的则指的是三维重建的栅格地图(如图1)。自动驾驶龙头老大Waymo做4/5级自动驾驶所需要的高精地图是数据量非常丰富的栅格地图,Uber自动驾驶所需的高精地图和我们在硅谷投资的高精地图公司Deepmap所指的高精地图都是这一规格。而地图行业的老牌提供商Here,Mobileye等所提到的高精地图产品则多半指的是应用于辅助驾驶和部分自动驾驶的矢量地图。
图1:三维重建高精地图(Source: DeepMap)
不同的自动驾驶等级所需要的高精地图(精度、地图要素等)不尽相同,但3D高精地图对高度自动驾驶的重要性却始终没变。自动驾驶应用层的三大模块—感知模块,定位模块,控制和决策模块—均与高精地图所提供的信息紧密相连(如图2)。定位模块地图在使用过程种最重要的输入信息,感知模块需要高精地图提供精准3D模型,控制和决策模块需要依赖高精地图的Routing语义信息。高精地图所提供的数据越丰富,三大模块才能做得更精进,能满足的自动驾驶的程度也越高。因此,作为如此重要的数字化基建模块,高精地图之于高度自动驾驶可谓是“大脑”和“眼睛”一样的存在。
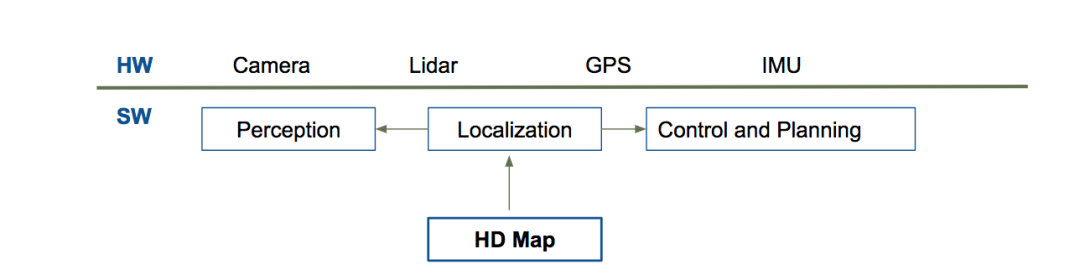
图2: 高精地图在自动驾驶模块中的位置
不同于辅助驾驶(ADAS)所使用的地图, 高度(L4)/完全(L5)自动驾驶时代的高精地图给传统地图提供商制造了非常大的难题。建立专业测绘车队,使用搭载昂贵传感器的外业采集车进行地图数据收集和后期维护更新成本太高。由于高精地图对地图要素的增加和地图精度的要求,生产和制作高精地图所需要的计算资源也呈指数级增长。大规模计算需要搭建复杂的后端架构以及人工智能模块来支持数据处理和地图更新。传统的制图过程已无法满足高效的采集、制作和更新高度自动驾驶高精地图。据业内专家透露,即使是导航地图,苹果和谷歌在拥有了如此大体量的数据后,每年需要花费近10亿美金来支持其导航地图业务。如此模式,对能用其他业务模式支撑收入的互联网巨头是令人头疼的高额负担,对高精地图初创公司是噩梦,对自动驾驶初创公司,则更是需要果断抉择是否要将地图模块剥离出来专心做驾驶技术了。
面对高昂的地图制作和维护成本,近期也有越来越多的地图初创公司提出了不同的降低成本的模式,经常被提到的有地图众包(类出租车)概念和依靠影像数据生成地图概念(或是利用行车记录仪或是搭载简易摄像头)。而这两种模式均是以牺牲高精地图的地图精度(质量)为前提。图像数据一般无法精确(厘米级精度)判断物体的距离,再加上一但有遮挡物,信息缺失就会非常严重。如果是原本依靠昂贵传感器收集数据做出的精确底图,叠加精度达不到要求的图像数据,会使地图精度不可逆转的越来越差。如果是依靠精度不高的图像数据生成的地图加上后续同样精度不高的 更新数据,这样的地图恐怕也无法满足客户对高精地图精度的要求。
商业模式的创新是中国创投市场喜闻乐见的形式,然而高度或完全自动驾驶涉及的技术领域非常广而且深,专业人士深思熟虑后的创新才是最可贵。谷歌地图和地球产品花了13年的时间,积累了大量专项技术,仍需每年花费巨额成本进行数据的维护和技术研发,足以见得这是一个需要大量专业人员和技术积累持续创新和贡献的领域。我们愿意与专业人士一起,为科技创新助力。
我们拥抱创新,我们尊重专业。金沙江创投,助力下一个独角兽!





金沙江创投
专注互联网早期投资

本公众号内容未经允许请勿转载,但欢迎转发朋友圈。







