能抗下强大阵风的无人机,你见过没?加州理工学院的研究者用深度神经网络让无人机不再怕风。
当风大到可以把伞吹坏的程度,无人机却稳稳当当,就像这样:
![]()
御风飞行是空中飞行的一部分,从大的层面来讲,当飞行员驾驶飞机着陆时,风速可能会给他们带来挑战;从小的层面来讲,阵风也会影响无人机的飞行。
目前来看,无人机要么在受控条件下飞行,无风;要么由人类使用遥控器操作。无人机被研究者控制在开阔的天空中编队飞行,但这些飞行通常是在理想的条件和环境下进行的。
然而,要想让无人机自主执行必要但日常的任务,例如运送包裹,无人机必须能够实时适应风况。
为了让无人机在风中飞行时具有更好的机动性,来自加州理工学院的一组工程师开发了一种深度神经网络 Neural-Fly,即一种人工智能工具,可以让无人机在有风的情况下保持敏捷,只需更新一些关键参数,即可帮助无人机实时应对新的和未知的风况。
文章开头我们已经初步见识到了无人机的抗风能力,下面展示了一架四旋翼无人机,借助该研究开发的工具,它可以在风速达到 27 英里 / 小时的情况下完成 8 字形穿梭操作:
![]()
![]()
为了让无人机可以在各种风速下穿梭,数据是必不可少的,这项研究需要的数据不多,在获得短短 12 分钟的飞行数据后,配备 Neural-Fly 的自动四旋翼无人机就学会了如何对强风做出响应。「用到的数据量非常小,」加州理工学院航空航天系研究生 Michael O’Connell 表示,他是论文作者之一。
这项研究已于周三发表在《科学 · 机器人学》(Science Robotics) 杂志上。
![]()
在 Neural-Fly 实验训练中,无人机在风洞中飞行,有六种不同的风速,最快的是 13.4 英里 / 小时。
![]()
根据这些数据,该团队创建了深度神经网络,然后让他们的飞行器能够熟练地在同一风洞中进行机动,例如以 8 字形图案放大大门或通过两个椭圆形大门巡航。无人机在测试中的速度比它在训练中遇到的更快:大约每小时 27 英里。这是该风洞可以产生的最大风速,该论文作者、加州理工学院研究生石冠亚指出。除了只需要少量数据外,该软件仅在 Raspberry Pi 上运行,这是一种廉价的计算设备。
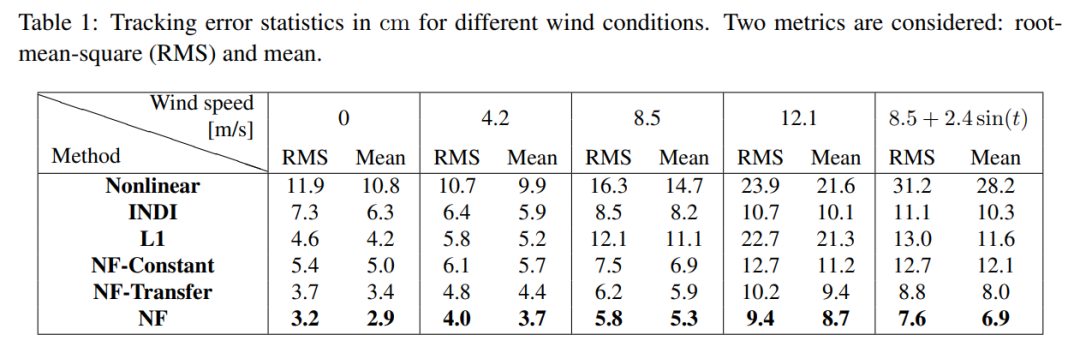
加州理工学院航空航天、控制和动力学系统教授、通讯作者 Soon-Jo Chung 表示,他们看到的误差率与现有的 SOTA 技术相比,配备新系统的无人机飞行性能要好 2.5 至 4 倍。
下图从左到右依次为石冠亚、Soon-Jo Chung 和 Michael O'Connell 。值得祝贺的是,石冠亚将在 2023 年 9 月入职卡内基梅隆大学计算机学院机器人研究所担任助理教授。
![]()
研究者表示,这项技术未来将被用于无人机快递或飞行汽车。
无人机(UAV)如果想要实现持续的商业化,在动态高速风中执行安全和精确的飞行机动至关重要。但是,由于不同风况之间的关系以及它们对无人机机动性的影响没有得到深入地研究,因此使用传统控制设计方法来设计高效的机器人控制器具有挑战性。
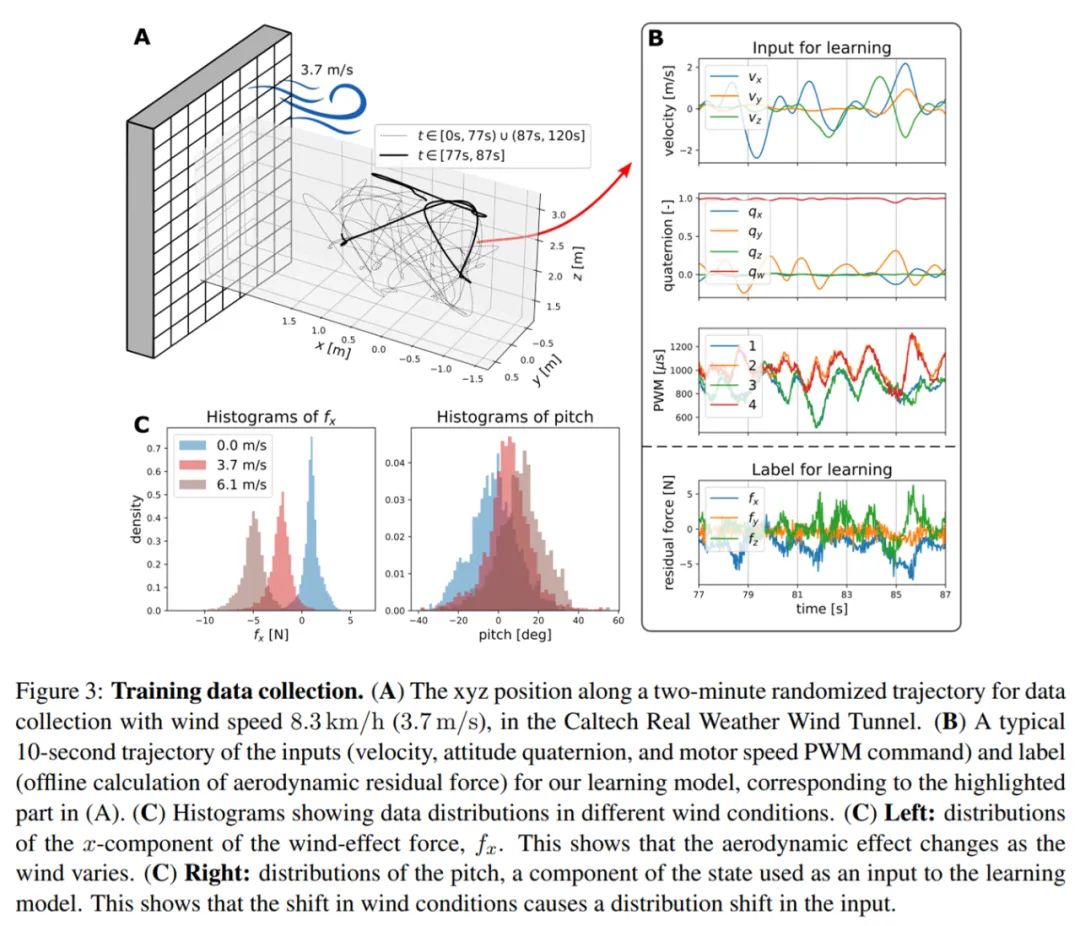
加州理工学院的研究者提出的「Neural-Fly」是一种数据驱动方法,它作为一种基于深度学习的轨迹跟踪控制器,可以学习快速适应快速变化的风况。下图 3(A) 为数据收集过程;3(B) 为风速 13.3km/h (3.7m/s) 的情况下,训练数据的输入和标签;3(C) 为不同风况下输入数据和标签数据的分布。
![]()
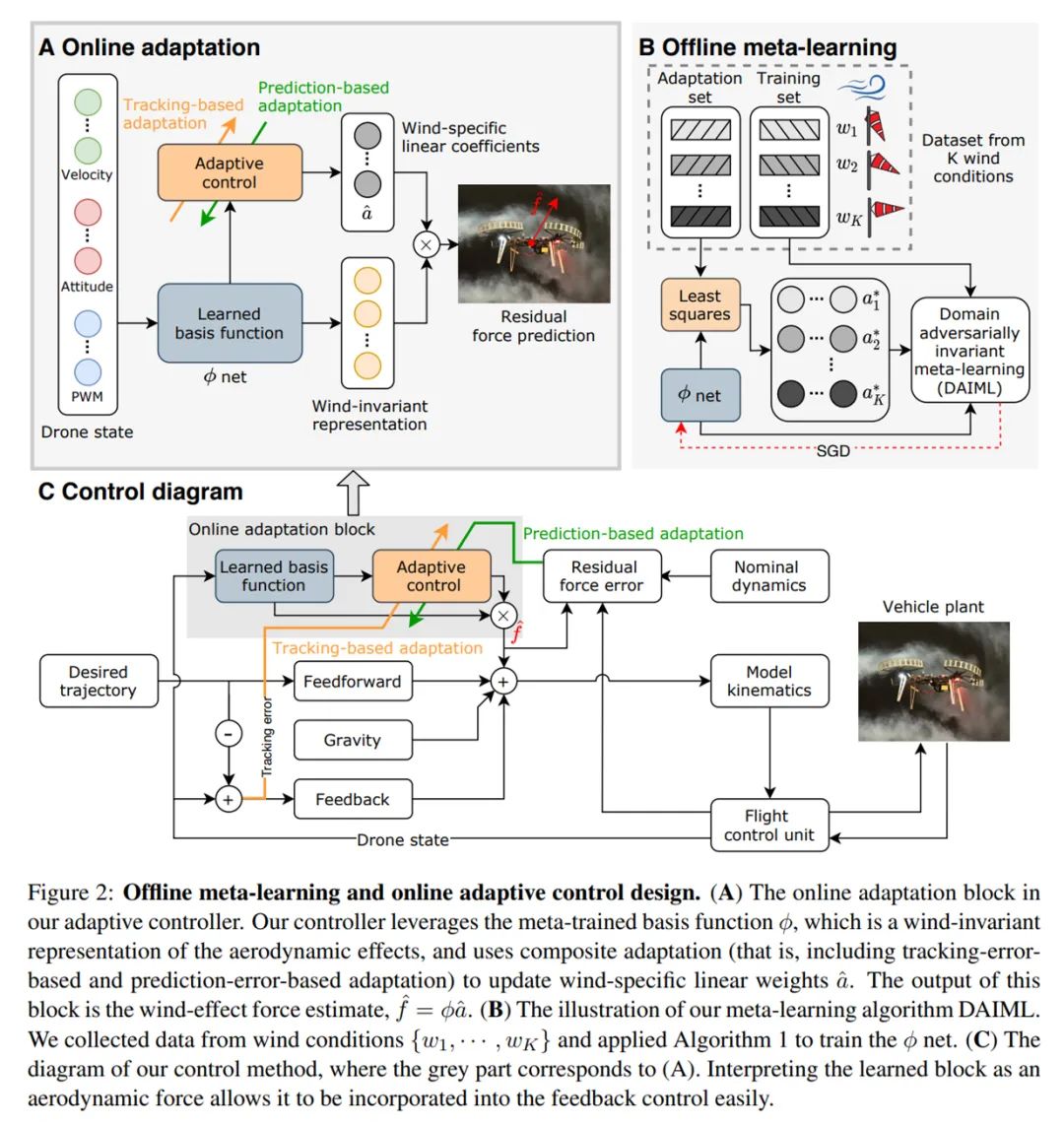
下图 2 为 Neural-Fly 方法概览,表明了它在自适应飞行控制和基于深度学习的机器人控制方面取得了进展。在标准 UAV 的动态风况下,Neural-Fly 实现了对灵活且具有挑战性轨迹的厘米级位置误差跟踪。具体来说,该方法主要有两部分组成,分别是
离线学习阶段和用于实时在线学习的在线自适应控制阶段
。
![]()
对于
离线学习阶段
,研究者开发了域对抗不变元学习(Domain Adversarially Invariant Meta-Learning, DAIML),它以一种数据高效的方式学习空气动力学与风况无关的深度神经网络(DNN)表示。该表示通过更新一组混合深度神经网络输出的线性系数来适应不同的风况。
DAIML 还具有数据高效性,
仅使用 6 种不同风况下共计 12 分钟的飞行数据来训练深度神经网络
。DAIML 包含的几种关键特性不仅可以提升数据效率,而且能够由下游在线自适应控制阶段提供信息。
值得注意的是,DAIML 使用谱归一化来控制深度神经网络的 Lipschitz 属性,以提高对未见过数据的泛化能力,并提供闭环稳定性和稳健性。此外,DAIML 还使用判别式网络来确保学得的表示具有风不变形,并且风相关信息仅包含在适应在线控制阶段的线性系数中。
对于
在线自适应控制阶段
,研究者开发了一种正则化复合自适应控制律,它是基于对学得表示如何与闭环控制系统交互的基本理解中得出的,并具有严格的理论支撑。
具体地,自适应律使用位置跟踪误差项和气动力预测误差项的组合来对与风有关的线性系数进行更新。这种方法有效地保证了对任何风况的稳定和快速适应以及对不完美学习的稳健性。尽管这种自适应控制律能够与很多学得的模型一起使用,但从 DAIML 中学习的精确表示有助于进一步提升自适应速度。
就 Neural-Fly 的效果而言,它比非线性跟踪控制器平均提升 66%,比 L_1 自适应控制器提升 42%,比增量非线性动态反演(INDI)控制器提升 35%。所有这些结果都是使用标准四旋翼无人机硬件完成的,同时运行 PX4 的默认调节姿态控制。
即使与没有外部风干扰和使用更复杂硬件的相关工作(比如需要 10 倍控制频率和使用直流电动机速度反馈的板载光学传感器)相比,Neural-Fly 的跟踪性能也具有竞争力。
![]()
研究者将 Neural-Fly 与两个变体进行了比较,它们分别是 Neural-Fly-Transfer 和 Neural-Fly-Constant。其中,NF-Transfer 使用从不同无人机的数据上训练学得的表示,而 NF-Constant 仅使用具有 trivial 非学习基础的自适应控制律。
Neural-Fly-Transfer 表明了对无人机配置变化和模型不匹配的稳健性,NF-Constant、L_1 和 INDI 方法都直接适应未知动力学,而不假设底层物理结构,它们具有相似的性能。
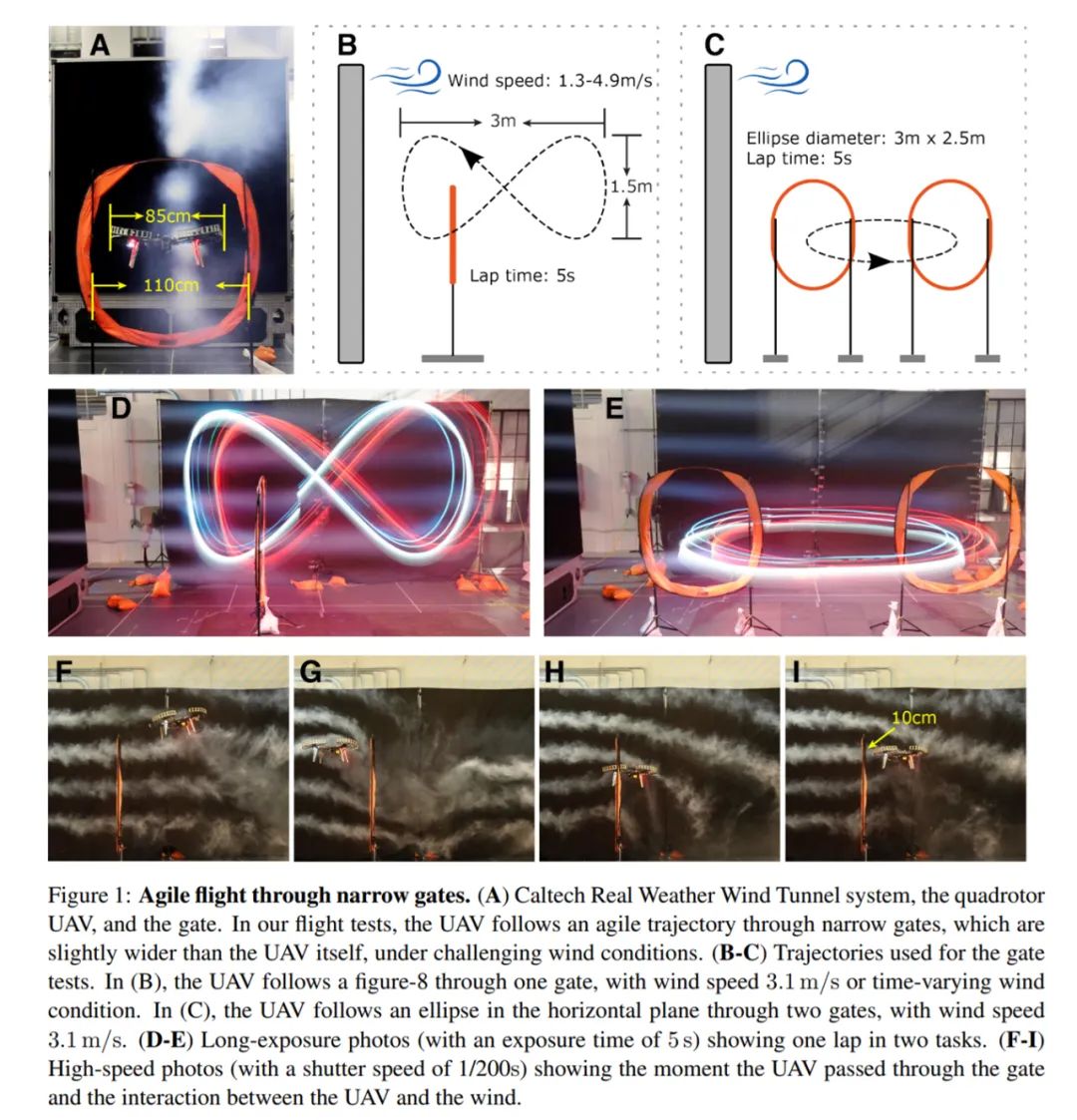
最后,研究者证明 Neural-Fly 能够实现一系列功能,允许无人机在狂风条件下遵循轨迹敏捷地飞过低高度门,具体如下图 1 所示。
![]()
https://www.science.org/doi/10.1126/scirobotics.abm6597
https://www.popsci.com/technology/neural-fly-ai-drone-in-wind/
![]()
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com