【CAA智库】复旦大学张军平:爱犯错的智能体(十九) – 群体智能与错觉

跨界
我是理科生
混进了一诗歌群
学习与赏析
诗歌中的意象与意境
有天好奇地问了句
为什么
诗歌一天能写好多
科研一年才一点点
灵感怎么差那么多?
于是
群里炸开了锅
有人说
科研哪要灵感
有人说
科研和科学研究
你知道区别吗
有人说
你做的是科研吗
一点数学也没有
我只好
展示了一些
我在
数学鄙视链
最底端的
统计学成果
还有
物理教学的
一点心得
结果
整个群里
只有
两个理科生
在激烈地
辩论着
偶尔会有人发表情包䁔场
群主最后
不得不出面
嗨,两位同学
这里是文学群
请不要讨论不相关的内容
个体成群后,才便于延续和壮大。人类和非人智能体在结成群体的进程中,从生存需求的共生到精神需求的依赖,经历了蜿蜒曲折的变化和调整,最终形成了精彩纷呈、各式各样的群体。而聚集成群的个体,会与独立存在或独处时,有一些明显的区别[1]。那群体的行为是如何体现的呢?它对智能有何影响,又有哪些错觉呢?
人类对群体行为的研究年代比较悠久。我国著名科学家钱学森先生在上世纪90年代曾提出综合集成研讨厅的体系。他强调专家群体应以人机结合的方式进行协同研讨,共同对复杂巨系统的挑战性问题进行研究。而将群体行为关联至智能学习则常从两个方面出发,一是分析宏观的群体表现,一是审视微观的群体行为。宏观主要从非人智能体的角度着手,以观察动物的群体行为为主。
天上的飞鸟比较容易看到的,但是形成能变换各种形状的飞鸟群却已不多见(图1)。不多见的原因与人类曾过度使用化学药品和肥料有关,美国科普作家蕾切尔·卡逊在其1962年的科普书《寂静的春天》介绍过。不过偶尔还能见到些,所以1995年Eberhart和Kennedy博士就分析了飞鸟集群觅食的行为。他们发现当鸟群需要的食物处在鸟群生活的某个区域时,在搜索食物时,每只鸟不仅会受自己飞行的路径影响,还会受和它相邻鸟群的局部飞行路线,以及鸟群以群体的整体飞行路线所影响。鸟群会通过共享这些个体和群体的信息,并通过不断交换和更新这些信息,最终鸟群能用“最优”的效率找到食物。基于这一观察,Eberhart和Kennedy博士提出了一套群体智能算法,称为鸟群优化算法(Bird Swarm Optimization)。如果把每只鸟假设成一颗粒子,一群鸟群则构成粒子群,则鸟群算法还有个更一般的名字,叫粒子群优化算法(Particle Swarm Optimization,简称PSO)[2]。
不仅天上的飞鸟有群体行为,地上的走兽穴蚁也有,而其中最方便观察、能频繁见到、密度又极高的群体是蚂蚁(图1)。于是,意大利的学者Dorigo和Maniezzo等观察了蚂蚁的觅食行为,在上世纪90年代提出了蚁群系统(Ant System或Ant Colony System)。不同于飞鸟,蚂蚁是通过一边行路一边释放“信息素”的物质(英文为:pheromone。通俗点讲,是体味的一种)来形成群体觅食行为的。蚂蚁会沿着“信息素”浓度高的路径来行走,同时它走过的时候也会留下自己的追踪“信息素”,进一步强化了可能到达食物的最短路径。同时, “信息素”会随时间的增长而挥发,以保证路径搜索不易僵化,失去灵活性。通过信息素的反复增强和淡化过程,蚁群就能沿最短路径到达食物了[3]。
蚁群和鸟群优化算法是文献中最经典的两个群体智能算法。事实上,非人智能体的群体行为有很强的多样性,如果留意观察各种群体的行为表现,还能找到更多很有新意的群体智能算法。
举例来说,美国德州奥斯丁议会大桥有群蝙蝠群。据估计,桥下生存了150万只墨西哥无尾蝙蝠(图1)。每到傍晚时分就会出洞,成群飞行去觅食,已是当地最负盛名的旅游景点。对飞行类群体智能行为感兴趣、希望找到新算法的不妨去观察观察。海洋中的鱼群也自有其特点。较小的鱼偏好成团,形成比较大的形状,如图1。与飞鸟不同,研究表明,小鱼爱成群的原因是较个体而言,鱼群的体积要大得多,能够让潜在的捕食者误以为是比它大的生物体,从而不敢冒然攻击,也就让小鱼多了生存的机会。除了觅食和生存行为,迁徒行为也可以研究。比如大雁南飞时的,头雁引航的人字形队现象。在迁徒中,头雁与其它从雁在决定路线方面的决策权方面显然存在大的差异。
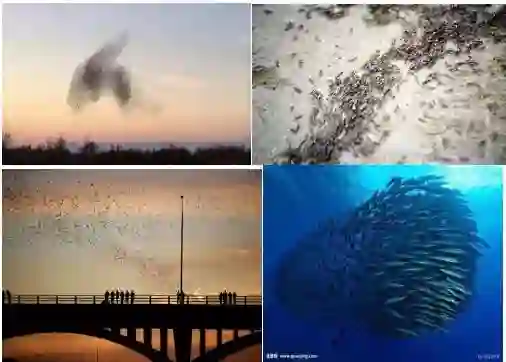
图1:从上到下,从左到右:
鸟群、蚁群、蝙蝠群、鱼群
当然,动物的群体行为也并非始终优于个体,常常是机会与风险并存。比如,蚁群靠追踪“信息素”来觅食的行为就不是百分之百安全。假如有一只引路的工蚁碰巧离开了有“信息素”的路径,跟着它集体觅食的蚂蚁都会离开路径,极端情况下会形成如图2的蚂蚁乱转(Ant Mill)的循环圆圈,最终导致蚂蚁因为体能耗尽而集体死亡。这是与群体优势相背的群体错觉。再比如小鱼的鱼群现象,有些捕食者就会故意利用这个习性。如杀人鲸(Killer Whale,也称虎鲸)为了提高吃小鱼的效率,会有意识地分散开将小鱼们围起来,驱使小鱼被动在包围圈内形成密集的鱼群,然后虎鲸便会轮流冲入圈中饱餐一顿。这是不同智慧级别的群体智能的对决结果。

图2 左:蚂蚁乱转 右:虎鲸在学习捕食鱼群技巧
不仅非人智能体存在值得研究的群体行为,微观层面中也有。
微观的层面可以分析群体行为的,一种是物理学中经常提及的布朗运动,即微小粒子的无规则运动。这种运动从单个微粒来看是无规则的、无序的,但从群体或整体来看却能形成运动中的动态平衡。最早是英国植物学家R·布朗从花粉中观测到这一现象。尽管解释很多,真正有效的解释还得归功于维纳于1863年提出的分子振动假说和爱因斯坦的分子运动论原理。1926年法国人贝兰和斯维德伯格因为实验验证了爱因斯坦的假说而获得诺贝尔物理学奖。
在布朗运动的基础上,科学家提出了模拟退火(Simulated Annealing)的智能算法。它模拟了金属退火中的加温过程、等温过程和冷却过程,通过增强和减弱随机游走的分子的布朗运动强度(如图3),使其最终形成有序的全局平衡或最优解 [4]。
除了分子的群体行为外,科学家们也看好基因。因为在算法层面上,进行群体的“基因编辑”都是相当安全且无伦理问题的。进化论告诉我们,基因的演化有三种模式:复制(reproduce)、交叉(crossover)和变异(mutation)。那么,如果要“编辑”出一个最优的“基因”,我们完全可以让成千上组“基因”通过这三种方式来实现优胜劣汰,最终收敛到期望的解。不过需要注意的是,在演化过程中,复制是根本,变异只能偶尔为之。这种基于基因群体行为的方法被称为遗传算法(genetic algorithm)[5]。
不仅微粒和基因有群体行为,甚至毫无生命特征的钞票,也有人观察到了有趣的群体流通行为。2002年德国物理学家Dirk Brockmann发现,尽管在绝大多数时间里,钞票只在一个较小的区域里交换,但是仍有一小部分钞票会流通到较远的地方,如图3所示。他将这种流通模式被称为列维飞行模式(Levy flight pattern),并认为其流通性质表明小概率的事件有时会产生较大的影响[6]。
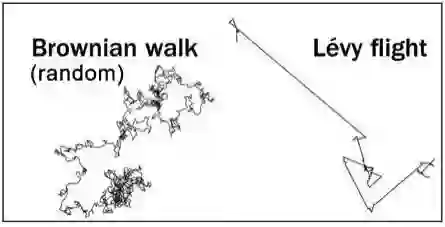
图3:布朗运动中的随机游走与列维飞行模式
不论采用的是哪种方法,从本质上都有一个隐含假设在其中。既认为个体的活动具有随机性,但纳入群体后,最终这种局部或个体的随机性可以收敛到全局平衡有序的环境。基于这一假设,以上提及的非人智能群体智能、微观群体算法和遗传算法常被用于目标的寻优,目的是为了帮助需要迭代求解或梯度寻优的算法获得最优解。需要注意的是,由于这类算法或多或少都带有比较强的启发式,因此不太容易找到好的理论性证明,如数学家们偏好的存在性、收敛性和唯一性等以及统计学家偏好的泛化界。即使有一些理论性的证明,也只是在给了较多假设条件后的有限结论。尽管如此,这类方法在工程上仍然形成了不少好的应用成果。
要发挥群体的优势,关键是多样性必不可少,因为差异大的时候更容易形成互补性。如蚁群算法中常假定每只蚂蚁具有独特的个性。不仅单个物种内部有互补性,跨物种间也存在互补性,甚至更明显。比如两种能独立生存的生物间的原始协作关系(Protocooperation),可以保证双方都能获利。图4中寄居蟹与附着于寄居蟹匿居的贝壳上的海葵、鮣鱼利用吸盘附着在鲨鱼体表与鲨鱼,都是这类原始协作关系。海葵借助寄居蟹、鮣鱼借助于鲨鱼扩大了活动范围和觅食机会,反过来海葵和鲨鱼又分别给寄居蟹和鮣鱼提供了保护。还有对一方有利,对另一方无关紧要的偏利共生(Commensalism),如常受海葵保护的双锯鱼。人类与宠物狗的共生也比较有意思。人从宠物狗中得到了情感的慰籍,老年人甚至把它做为已自立门户的子女的替代品。而宠物狗也不仅仅是得到食物,还从人类这里学习了很多人类的行为规范。值得再次强调的是,机器智能目前还无法替代宠物狗的共生功能。而在人工智能领域,也有不少研究是在学习和利用这种跨物种间的互补性,如利用地面机器人与无人机的互补性来实现对未知环境的快速探路。而2017年出台的《新一代人工智能发展规划》中,也强调了要着重研究“多人多机联结,使之涌现出更强大智能”的群体智能。

图4: 左:寄居蟹与海葵 右:鮣鱼与鲨鱼
在通讯中也能见到利用多样性和互补性的应用。如在信道的误差纠编中,为了保证信息在传输中不发生错误,最简单的操作就是多传输几次。尽管每一次都有可能出错,但只要出错的位置不同,总能通过少数服从多数的方式来大幅度降低传输犯错的概率,最大程度地保证信号传输的正确性。
机器学习界把利用集体或群体来增强性能的策略叫做集成学习(Ensemble learning)。要在集成框架下获得好的性能,基本假设是每个子体学习器要有一定的预测能力,比如至少要比扔硬币随机猜的性能好一点,同时分类器之间要有足够大的多样性或差异性。在这一思想下,大量的集成学习方法被发展。以分类任务如人脸识别为例,早期端对端的深度学习还未流行时,一般都从三个角度来实现群体的集成。或是改变输入的特征,形成多样性;或是变更学习器的多样性,或是动最终输出函数的集成方式[7]。虽然基本套路并不复杂,但俗话说得好“三个臭皮匠抵个诸葛亮”。在 2012年深度学习没有形成大的性能提升前,集成学习模型形成的群体优势几乎是打遍了“所有与数据相关的竞赛”而无敌手。而2012年后,尽管深度学习成为主流,但仍然能见到集成学习的三板斧,有些是转化成了深度学习中网络的结构变化,有些仍是通过把多个深度模型结合来继续用群体优势拔得竞赛的头筹。
图5:三个臭皮匠顶个诸葛亮
如果分析以上这些群体智能学习,不难发现,这些群体算法要么是针对某个目标的优化来考虑的,要么是针对某个目标的预测来实施的。研究非人智能体的群体算法时,科学家们着重观察的现象似乎主要与其群体的生存密切相关。反观人类,在成了地球主宰后,早已不再仅仅满足于生存需求,还衍生了生理、安全、社交、尊重和自我实现共五个层次的需求,被称为马斯洛需求层次理论。而这些高层次的需求在人工智能的学习中却很少被涉及。

图6:马斯洛需求层次理论
如果要研究人工智能,必然要考虑人工智能体形成社会和群体、而非个体时的情况。那我们不妨看看,人类智能体在生存需求以上,群体生活时会存在哪些错觉。如果人工智能体希望模拟人的群体行为,也许就能从这些错觉中得到一些经验的借鉴。
一旦有了社会,生存需求就退居二线了。此时的群体不再满足于以“预测”为终极目标的,对知识的渴求会逐渐占上风,尤其是信息量大的知识。比如“太阳从东边升起”这种自然规则,按概率来说,就是百分之百能成立的。然而他却是没有知识含量的。因为 按信息论之父香农的定义,信息是事件出现概率的倒数的负对数比。简单来说,百分之百出现的,信息等于0。对习惯快思维的人类来说,这类信息会和路面的细节一样被直接忽略。如果事件出现的概率很小时,反而蕴含了大的信息量。比如马路上突然有人打架,于是路人们会一拥而上,观战拿手机发朋友圈。这是信息论下“对知识的渴求”表现出来的群体本能反应。
可是假如不是打架,而是刑事事件时,旁观者愿意主动施救的反而可能变少,尤其是在人来人往的场所。这是因为当在场的人太多时,帮助的责任就被大家平分,平分到连旁观者都意识不到,以至于给人造成了“集体冷漠”的感觉。这不是信息量在起作用,而是责任分散效应的群体错觉。我国的“三个和尚”故事中讲的“一个和尚挑水喝,两个和尚抬水喝,三个和尚没水喝”,就是责任分散效应的体现。
也有人期望通过群体的力量获得集成学习般的性能提升。然而,“物以类聚、人以群分”,即使现代社会也是如此,如朋友圈中的五花八门的群,常是因某一方面的共性而形成的群体。在这种群体时,执异见的更容易被孤立而非接纳。不仅群体有排斥现象,甚至有时还会有智商、情商的拉低效应。比如如果参加传销团体,人会不由自主失去自我意识,导致本应正常的智商无法表现,变成智力水平低下的生物。这些现象是群体的拉平错觉[1]。
群体智能在少数服从多数问题上也存在误区。因为群体经常表现的是普通品质,并不能胜任需要很高智力才能完成的工作[1],但却可能因这一规则而扼杀智慧。比如在早期科学还处在启蒙阶段时,哥白尼因坚持日心说而被教会烧死,而伽利略为了保全性命不得不牺牲掉自己对这一观点坚持。这些都表明多数投票策略可能存在的风险,因为真理并一定都掌握在多数人手里的。这是统计中在缺乏先验信息时,采用群体平均权重引发的错觉。
这也反映了另一个现象,在群体社会中,成群并非对所有人都是最优的,因为“牛羊才会成群,狮虎只会独行”。 毕淑敏说过“孤独是一种兽性”。它反映了独来独往的自信和勇猛。适当享受个体的孤独,还能更有效的管理时间和自由的探索。
群体错觉还有不少,它间接或直接地导致了社会的多样性和层次性。这些是我们在研究人工智能群体行为时需要注意的,也是人工智能体未来形成人工智能社会时需要考虑的。
到此为止,我已经从诸多层面介绍了人类的错觉。我们不禁要问,人类如此爱犯错,为什么还能主宰世界呢?机器智能会替代人类成为主宰吗?
来源:CAA混合智能专委会
往期文章推荐
🔗【重要通知】中国自动化学会关于2019年度国家科学技术奖提名工作的通知
🔗【CAC2018大会报告】郑南宁:无人驾驶还有哪些坎儿
🔗【全国学会优秀改革案例汇编】学会治理结构与治理方式:会员(代表)大会
🔗【NIIS2019】大咖齐聚共绘健康蓝图,2019国家智能产业峰会智慧医疗平行论坛即将在青岛召开
🔗【全国学会优秀改革案例汇编】学会治理结构与治理方式:理事会(常务理事会)
🔗【NIIS2019】创新驱动发展,智造引领未来 ——2019国家智能产业峰会智能制造平行论坛即将在青岛召开