大脑通过统计推理表征“自我”
来源: 脑智卓越中心
9月3日,《美国科学院院刊》在线发表了题为《猕猴对自我身体表征的统计推理》的研究论文。该研究由中国科学院脑科学与智能技术卓越创新中心(神经科学研究所)、上海脑科学与类脑研究中心、灵长类神经生物学重点实验室王立平研究组完成,博士后方文为该论文第一作者。在该研究中,研究人员利用自主设计搭建的虚拟现实呈现系统,在人类和猕猴被试上建立身体幻觉行为学范式,并首次在猕猴上对其身体“拥有感” (ownership) 进行定量行为学测量和计算建模。更重要的是,研究人员通过电生理记录的方式,发现了猕猴大脑前运动皮层的群体神经元以贝叶斯因果推断的方式对身体拥有感进行编码。
我们的大脑究竟如何感知自己?自我意识的神经机制是什么?这一直是神经科学领域中最激动人心的问题之一。虽然意识问题极其复杂,所涉及的内容也非常广泛,但其中最为核心之一的是我们对于自我身体的感知。在利用身体错觉现象考察自我身体感知的研究中,前人发现我们对身体的感知并非一成不变。在特定条件下,大脑也会将外界物体感知成自身身体的一部分,或者失去对自己身体部位的感知。虽然脑影像研究已经发现,身体错觉实验中对例如非身体物体(例如橡皮手)拥有感的强弱与人脑前运动皮层的激活程度有关;猕猴前运动皮层和顶叶皮层的电生理工作也显示,这些区域中神经元对手臂空间位置的编码同时受到本体感觉手臂位置和视觉手臂信息的调制;但我们对于自我身体表征(Bodily self-representation)的计算和神经编码机制却仍不清楚。

为了在神经元和大脑环路水平上探究自我身体表征的机制,研究人员利用自主设计搭建的、能诱导手臂感知错觉的虚拟现实呈现系统(图1A),通过目标点指向任务(图1B),开展了让猕猴汇报自身手臂位置而推理其身体幻觉强度的研究。在行为学任务中,被试通过伸手指向视觉目标点来确认自己手臂的位置。当被试在视频反馈系统中所见的视觉手臂和真实手臂发生偏差时,被试因为身体错觉而导致其确认的手臂位置(目标点)与实际手臂位置间产生不同程度的偏差,即本体感觉偏移(图1C)。对人和猕猴行为结果的分析显示,当视觉-本体感觉偏差较小时,本体感觉偏移基本上由视觉信息主导,即被试认为视觉手臂为自己的手臂;而当偏差逐渐增大时,本体感觉偏移却不再增大或甚至减小,表明了被试更多地利用了本体感觉手臂而忽略视觉手臂信息,即失去了对视觉手臂的拥有感。该项研究通过客观测量的方式,首次证实了猕猴也能产生与人类相似的身体幻觉。
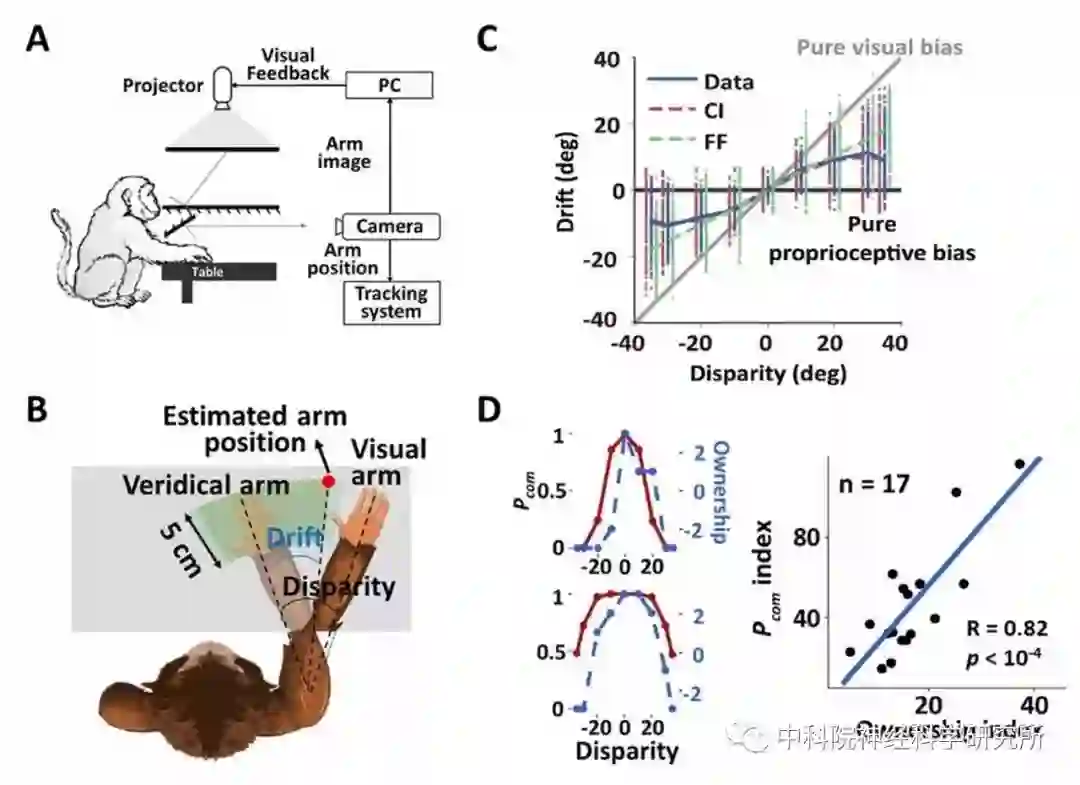
图1. A. 基于虚拟现实系统的身体幻觉研究平台。B. 指向任务中正确区域定义及本体感觉偏移的测量。C. 行为学结果以及两种模型(CI:贝叶斯因果推断模型,FF:最优整合模型)的拟合结果比较。D. 模型拟合的Pcom与人类被试的错觉打分非常类似。左侧图为两名典型被试,红色线为Pcom,蓝色先为错觉打分;右侧图为被试间的相关性。
为了进一步定量的描述手臂拥有感与本体感觉偏移以及视觉-本体感觉信号输入之间的关系,研究人员利用贝叶斯因果推理模型对人和猕猴的行为结果进行了拟合(图1D)。该模型认为当视觉-本体感觉信息的空间位置越接近,大脑认为两者来自同一来源(common source)的概率越高,从而有更高的概率认为视觉手臂和本体感觉手臂两个信息来自同一来源,那就自我的身体(图2A)。拟合结果显示,人和猕猴对手臂视觉-本体感觉信息的整合都符合贝叶斯因果推断理论,并且模型所预测的视觉-本体感觉来自同一来源的后验概率(Pcom)与人类被试通过问卷汇报的身体拥有感打分存在显著的相关性。这些结果第一次发现,通过客观的行为学指标可以定量地测量猕猴对手臂的主观拥有感。
基于上述身体拥有感的行为学指标,研究人员记录了猕猴前运动皮层中神经元在行为任务中的放电反应。分析结果显示,单个神经元和群体神经元的放电活动与手臂拥有感指标Pcom显著相关。在猕猴行为表现出较高Pcom的试次中(图2A,下方图中颜色较红的试次),其神经元的反应也更接近整合视觉手臂时的放电活动;而在猕猴行为表现出较低Pcom的试次中(图2A,下方图中颜色较蓝的试次)其神经元的反应也更接近分离视觉手臂信息时的放电活动。利用支持向量机的解码分析同样表明,群体神经元的放电反应能够准确解码其对应行为结果中Pcom的动态变化(图2B)。
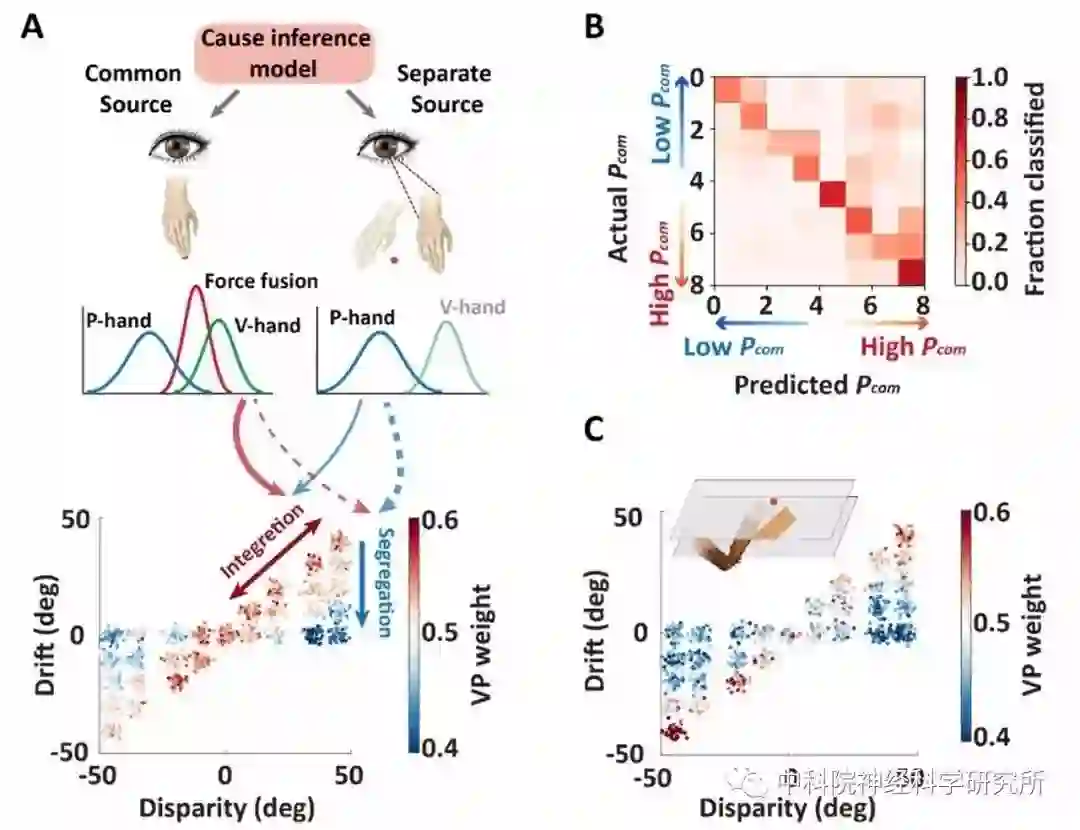
图2. A. 贝叶斯因果推断模型示意图及群体神经元在不同行为表现下的放电反应。B. 群体神经元反应能准确解码行为结果中“一个源”的后验概率(Pcom)。C. 木块条件下群体神经元的活动更接近“视觉和本体感觉手臂来自不同来源”时放电反应;插图为木块条件示意图。
贝叶斯因果推理模型和前人的研究都提示,当视觉信号的生理属性和大脑中身体内在表征不一致时,大脑认为视觉-本体感觉来自同一来源的先验概率(Prior)显著减小,因此其对视觉手臂的拥有感也将显著降低。因此,研究人员还尝试将视频中的手臂画面替换成了身体无关的视觉刺激——与真手大小相似的木块。研究人员发现,当视觉信号与身体生理属性不一致时,人和猕猴的本体感觉偏移显著降低。贝叶斯因果推断模型的拟合结果也显示,木块条件下“一个源”的后验概率(Pcom)和先验概率(Prior)都显著低于手臂组(图2C)。这些结果也进一步验证了模型中的Pcom与手臂拥有感的相关性。此外,猕猴的电生理结果也显示,前运动皮层中单个神经元和群体神经元在木块条件下的放电反应整体都更接近视觉手臂拥有感较低时的放电反应。
该研究中的行为学和电生理结果表明,大脑对身体拥有感以及身体空间位置的编码不仅依赖于外界的视觉-本体感觉信息输入,还受到内在已有的身体表征的影响,并以多层级的贝叶斯因果推理的方式整合不同输入和不同层次的信息。这一发现第一次为自我身体感知的理论模型提供了重要的行为学和电生理证据,也为进一步研究身体自我意识的神经机制提供了行为学范式和非人灵长类动物模型,在自我身体相关的精神疾病治疗以及神经义肢的开发中也具有重要的参考价值。
该项工作由方文博士在王立平研究员指导下完成,研究实习员李俊汝在数据分析上提供了重要帮助,博士生齐光耀和李晟豪也部分参与课题。该研究得到中科院前沿科学重点研究项目、中国科学院战略性先导科技专项、中科院百人项目、上海市重大科技专项和上海市重大基础专项的资助。
《崛起的超级智能》一书主要阐述当今天人类为人工智能的春天到来而兴奋,为人工智能是否超越人类而恐慌的时候,一个更为庞大、远超人类预期的智能形态正在崛起,种种迹象表明50年来,互联网正在从网状结构进化成为类脑模型,数十亿人类智慧与数百亿机器智能通过互联网大脑结构,正在形成自然界前所未有的超级智能形式。这个新的超级智能的崛起正在对人类的科技,产业、经济,军事,国家竞争产生重要而深远的影响。
作者:刘锋 推荐专家:张亚勤、刘慈欣、周鸿祎、王飞跃、约翰、翰兹
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”





