【特约稿件】姜力:智能假肢手的生机电集成

哈尔滨工业大学机器人技术与系统国家重点实验室, 黑龙江哈尔滨 150001
关键词: 智能假肢手, 生机电一体化, 集成, 生机接口, 电刺激
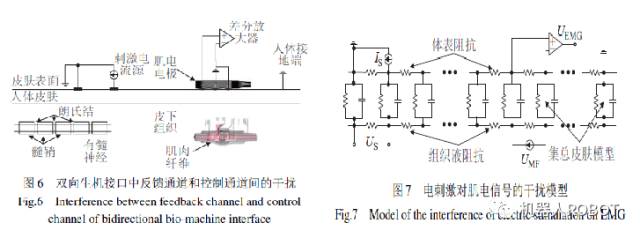
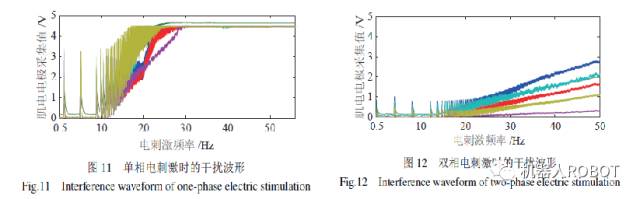
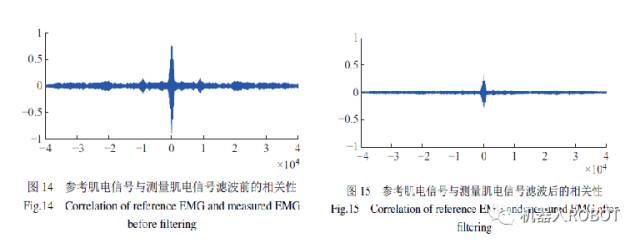
摘要: 探讨了智能假肢手生机电集成的关键问题,包括与生机接口功能匹配的灵巧操作机构设计、假肢本体的机电集成、假肢与人体的物理集成界面、双向生机接口集成等.然后,研究了驱动内置型智能假肢手指的集成化设计方法,该手指具有3维力触觉、力矩和位置感知功能,且传感器、驱动器和控制器均集成在手指内部.针对神经控制通道与感知反馈通道间的干扰,结合电刺激对肌电信号(EMG)的干扰模型,提出了基于双相电刺激和自适应滤波的干扰抑制方法.实验验证了该方法的有效性.
来源:机器人ROBOT

登录查看更多
相关内容

Arxiv
4+阅读 · 2018年7月18日
Arxiv
5+阅读 · 2018年4月13日
相关主题





相关VIP内容
相关资讯
相关论文
Arxiv
4+阅读 · 2018年7月18日
Arxiv
5+阅读 · 2018年4月13日