从数据处理到建图,以实际工程项目透析激光SLAM技术
SLAM在室内机器人实现自主导航的过程中发挥着至关重要的作用。激光SLAM早已被研究的比较透彻,框架也已初步确定。激光SLAM是目前最稳定、最主流的定位导航方法。
随着激光SLAM理论与技术的成熟,落地产品也更为丰富。如家电扫地机行业,仓储自动搬运AGV,移动送货机器人,自动驾驶等。
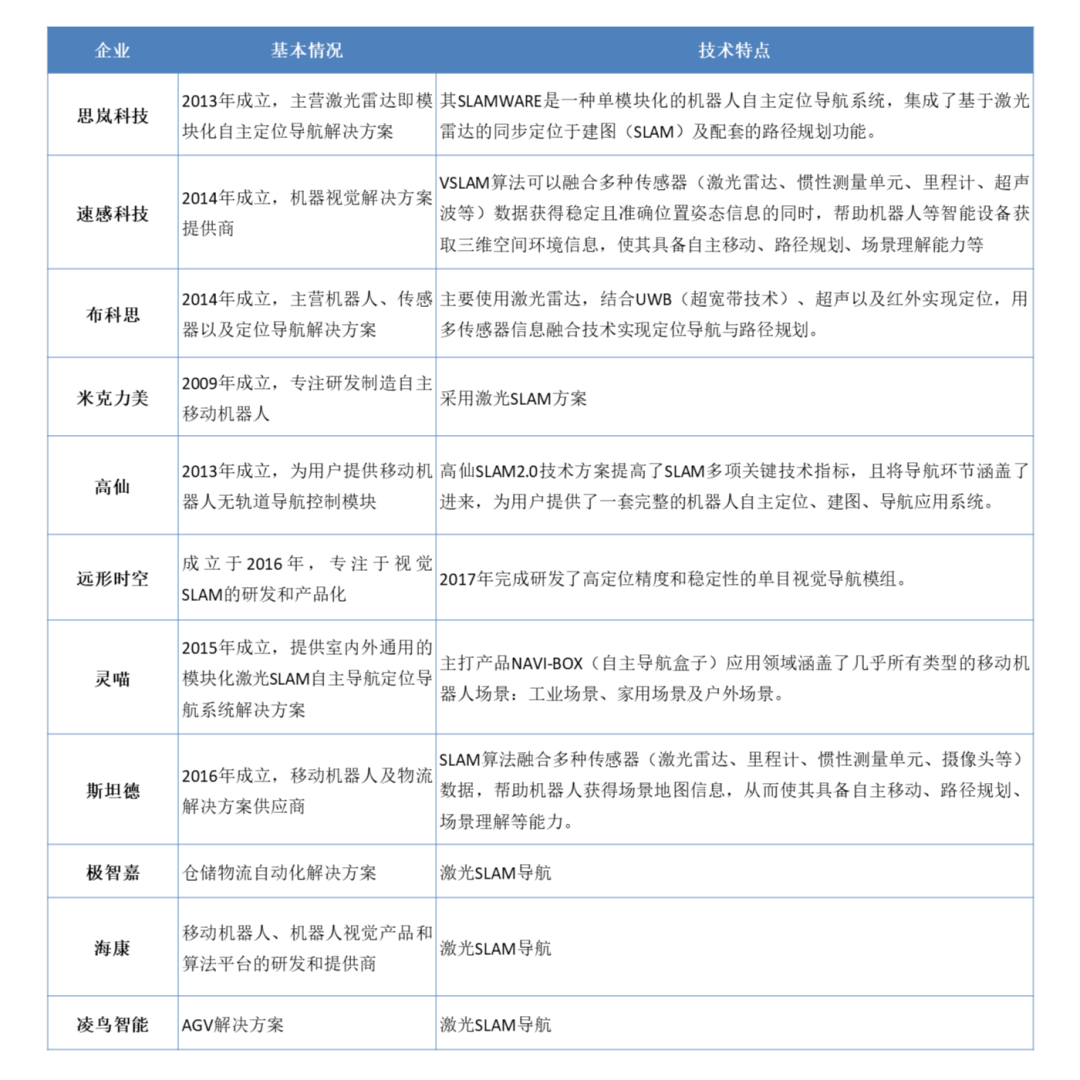
 机器人的广泛落地应用,使得各行各业极大提高了生产力及生产效率,也有众多企业加入到机器人的研发生产中,而机器人的关键技术是地图和定位问题(SLAM),众多企业选择使用激光SLAM技术方案。
机器人的广泛落地应用,使得各行各业极大提高了生产力及生产效率,也有众多企业加入到机器人的研发生产中,而机器人的关键技术是地图和定位问题(SLAM),众多企业选择使用激光SLAM技术方案。
SLAM技术彻底解决了机器人研究领域中“我在哪儿”的问题。但对于初学者,激光SLAM入门门槛较高,自学难度大,很多初学者仅看相关的开源代码,调参调库进行仿真。尽管能够复现别人的结果,由于不理解系统的根本原理,不仅在学习研究中难取得实质性进步,在应聘时与企业所需相差甚远,频频受挫。
想要入门的伙伴,如何高效入门、了解整个激光SLAM系统流程? 已经工作的伙伴,如何系统了解整个框架及当前最新的主流算法,提升个人能力水平并具备创新的能力?
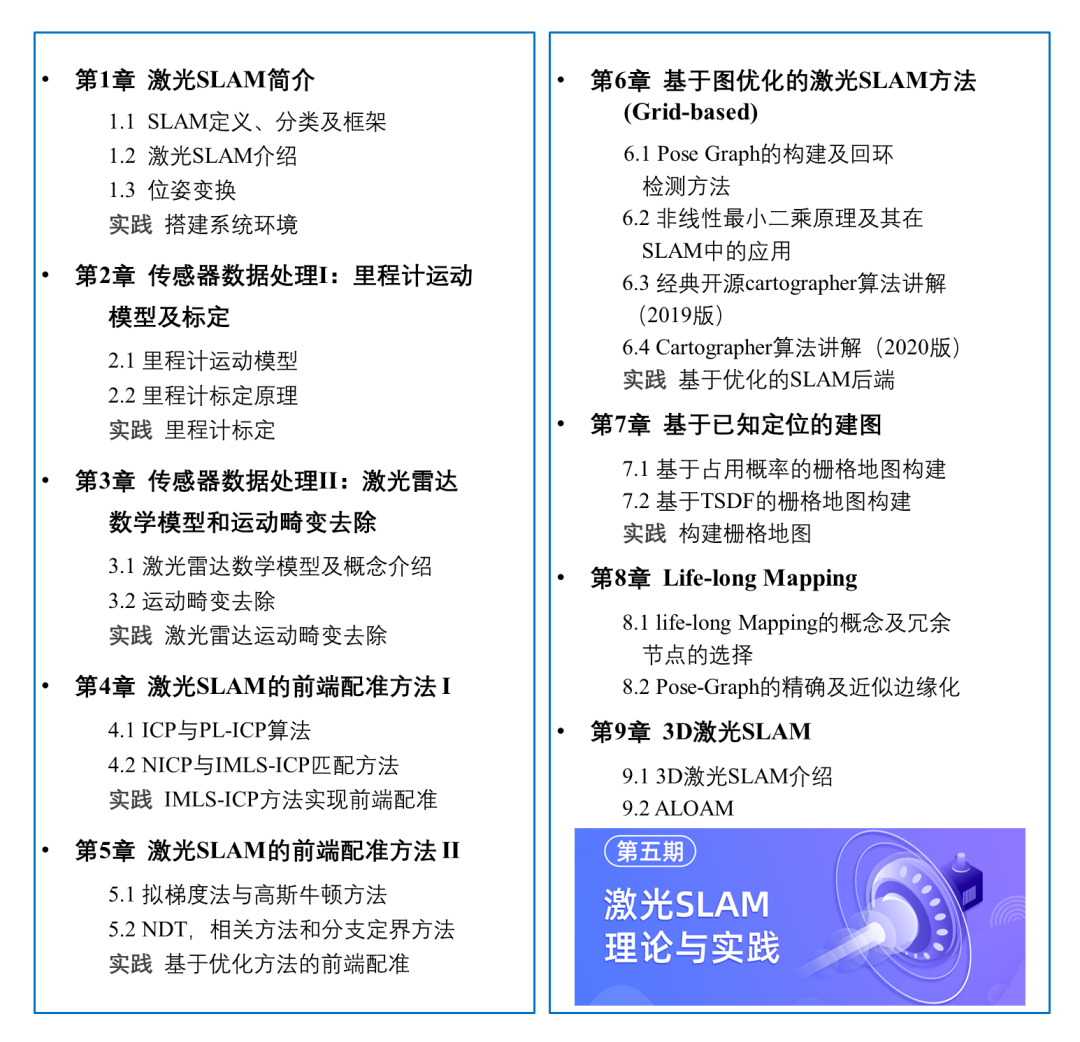
课程根据往期学员反馈,对本期课程进行迭代,增加了前端配准的内容,详细介绍一些配准方法;后端部分,去掉了实际应用较少的基于滤波器的方法,让大家更高效学习!
并且,本次课程讲师会为大家带来一些激光SLAM技术在产品落地时的一些分享。课程将于11月27日正式开课,诚邀大家共同参与学习!
这门课程将会是你学习激光SLAM效率最高、最明智的选择!
电子科技大学硕士
1、社群答疑
课程建立答疑群,高效获取疑问解答的同时,结识更多同领域的伙伴。
2、“三师”助力
班主任督促学习、助教及时批改作业并配合讲师微信群答疑,及时解惑,高效学习。
3、作业迭代
提交作业,助教批改后,根据助教意见对作业进行迭代修改;没有最好,只有更好!
4、定期班会
备注「life」,快速报名!

添加客服「奕木」,咨询更多
登录查看更多
相关内容

Arxiv
0+阅读 · 2021年1月28日




相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2021年1月28日