仅1.1克重,最快的软跳跃机器人Made in China!

撰文:库珀
编审:寇建超
排版:李雪薇
如今,中国科研团队提出了一种基于软电静力学弯曲致动器的,电静力学驱动的系绳无腿软跳跃机器人,这种机器人仅仅 1.1 克重、6.5 厘米长,0.85 毫米厚,能够实现 7.68 倍体高的跳跃高度和每秒 6.01 倍体长的连续向前跳跃速度,结合两个执行器单元,可实现每秒 138.4°的转向速度。

研究人员还将其他功能性电子设备(如传感器)集成到制动器上,从而实现包括侦测环境变化在内的多种应用,并建议未来进行结构优化以改进软体机器人的跳跃性能,未来或对无绳方案的进一步研究或可增进这类软体机器人的通用性。

目前,业界已经开发出了能够向前导航的软或部分软跳跃机器人,驱动方式也十分多样,有集成弹簧、形状记忆合金(SMA)、磁致动器、光动力致动器、介电弹性体致动器(DEA)、气动致动器、化学致动器、电机和聚偏二氟乙烯(PVDF)致动器驱动等。
有一部分是储能跳跃机器人,这类机器人通常具有强劲的单跳性能,但由于需要额外的弹性储能过程,因此需要牺牲导航效率为代价。
此外,尽管储能过程的延长增加了跳跃高度,但降低了着陆稳定性,同时降低了跳跃频率;由气动执行器、化学执行器和电机驱动的软跳跃机器人,通常需要复杂的导航策略和结构;而基于 DEAs 和 PVDF 执行器的轻型软跳跃机器人,可以通过弯曲身体部位进行简单跳跃,无需额外储能,这会导致快速跳跃频率,但它们的 JHs 和 JDs 不足以满足跨越障碍物的要求(<0.25 体高)。
液压放大自愈静电(HASEL)执行器可以通过电流体静力学改变内部液体的分布来实现线性运动,这种电液驱动方法可以在很短的时间内产生跳跃所需的能量,而不需要复杂的能量储存过程,是快速越障机器人的潜在解决方案,但仍面临三大挑战:
(1)在没有堆叠的情况下提高单跳性能;
(2)实现快速恢复;
(3)产生向前跳跃和转向跳跃。
经过深入分析这些机器人方案的优劣势和性能后,研究人员使用基于电静力学原理和框架的快速弯曲和回弹,来增强致动器的跳跃性能。
初步实验表明,sEHBA 的快速响应特性导致短启动时间(~10 ms),LSJR 可用于实现 7.68 个身体高度的 JH,单次跳跃为 1.46 个身体长度,连续向前跳跃速度为 390.5 mm/s(每秒 6.01 个身体长度),频率为 4 Hz。
他们还证明了双体 LSJR 的转向速度能够达到每秒 138.4°,是现有软跳跃机器人中速度最快的。
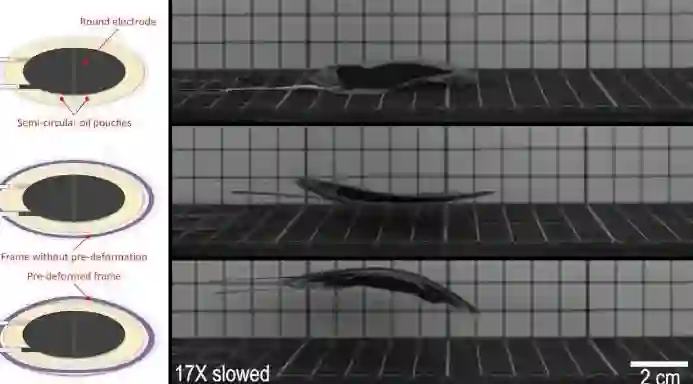
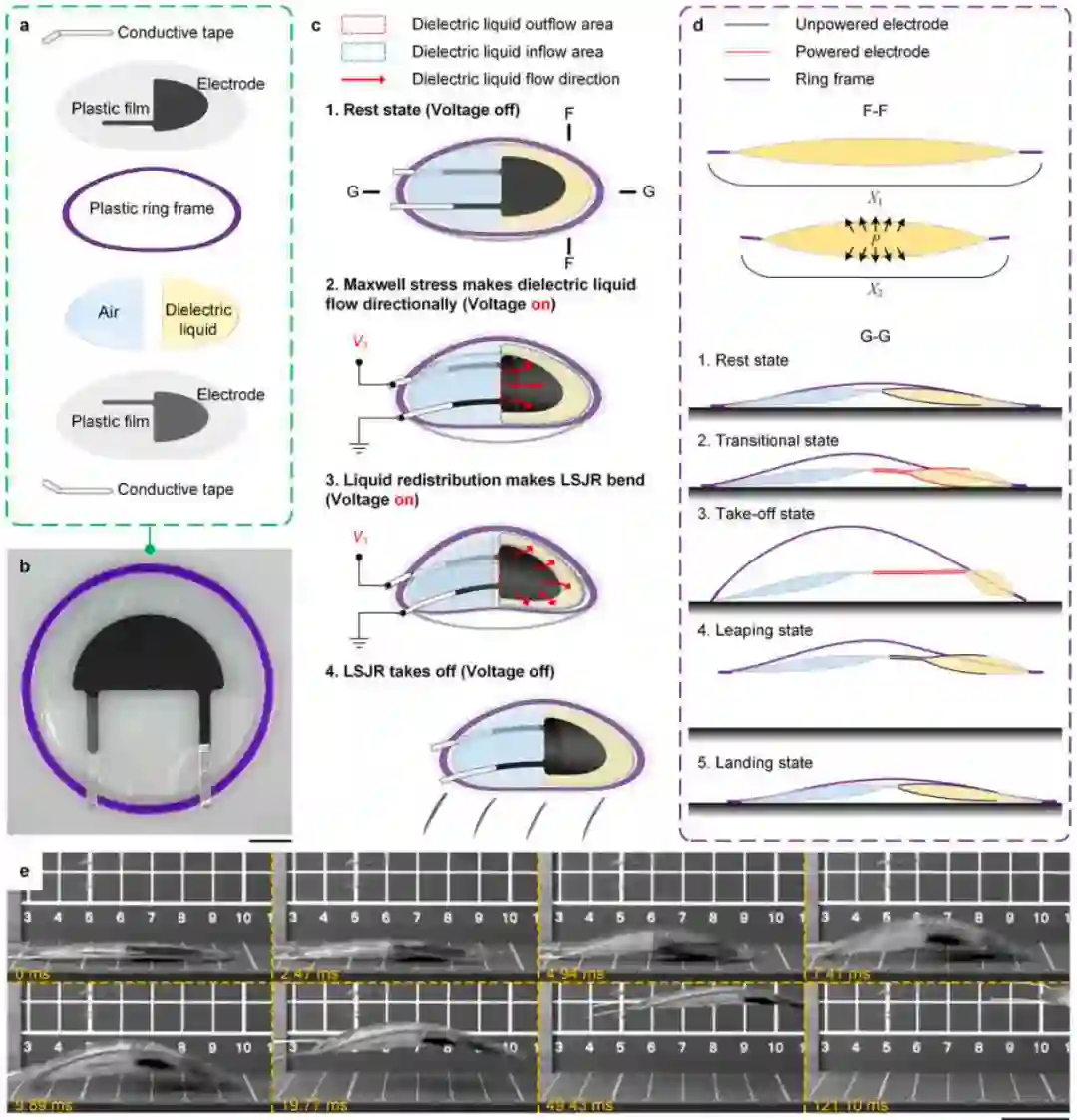
从设计理念和运动原理方面来讲,研究人员将一个 HASEL 型致动器热封为一个半圆形分离 HASEL(SCS-HASEL)致动器,该致动器由两个基于拉链机制的半圆形液体袋组成,然后,用等量的空气替换 SCS-HASEL 致动器后半圆袋中的介电液体,并移除后半圆袋的覆盖电极,使介电液体能够相对于整个致动器各向异性流动。
正如预期那样,可以发现特殊的液-气布局可以使液-气致动器向前跳跃,即使气囊在地面上跳动,这是因为电极挤压液体电介质,使其快速流动,LSJR 通电弯曲自身,从而使其获得初始动能。为了进一步提高 LSJR 的跳跃性能,可以用氦气或其他密度较低的非爆炸性气体替换该袋中的空气。轻巧的机器人设计使跳跃和着陆稳定,不会翻船。
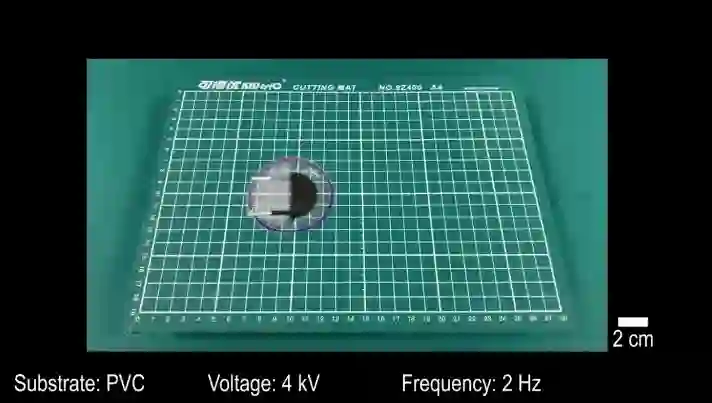
此外,连续向前跳跃速度(CFJS)是连续向前跳跃机器人的一个重要性能特征,在 10 kV和 4 Hz 下,平均旋转速度(TS)=138.4°/s, 据论文描述,这是现有软跳跃机器人中速度最快的,这是在木板上的成绩。 而在不同的衬底上会大大影响连续跳跃能力,在表面光滑的玻璃板上,同样 10 kV 和 4 Hz 的条件,平均 TS 仅为 27.9°/s。足够的基板表面粗糙度不仅可以防止机器人在连续运动中打滑,还可以阻碍无动力 LSJR 的运动,从而影响转向行为。
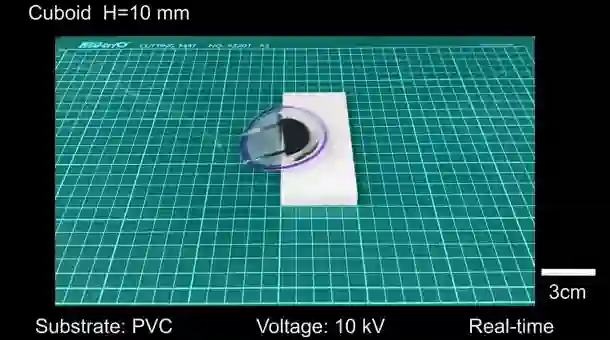
LSJR 具备较好的越障能力,有望在复杂和非结构化的环境中进行探索、检查和侦察任务。在 10 kV 的外加电压和 4 Hz 的驱动频率下,单体 LSJR 以 16.3 mm/s(0.25 体长/秒)的 CFJS 爬上玻璃板(倾斜角度为 3°),跨越直径为 6.3 mm 的电线,跨越 8 mm 高台阶以及跨越连续台阶。
在障碍物高度间隔为4 mm 的穿越试验中,LSJR 可穿越的最大高度为14 mm(长方体),18 mm(三角棱镜和圆柱体),还能顺利穿过含有许多砾石(大小:3 到 6 mm)的砾石丘。
采用特殊液气布局和边缘固定预弯框架,实现了由周期性马鞍形弯曲和各向异性液体流引起的快速连续向前和转向跳跃运动,这弥补了 HASEL 致动器的一些局限性,包括:(1)无法实现的向前和转向跳跃;(2)没有堆叠的单跳性能较弱;(3)无法快速恢复。在连续向前跳跃运动中,每次跳跃的角度偏差可控制在 8°以内,机器人的最大跳跃高度可以达到 18 毫米。
LSJR 的跳跃性能不仅取决于外加电压,还取决于各种运动基板的表面纹理,在相同的外加电压(10 kV,4 Hz)下,表面最光滑的玻璃基板提供了所有基板中最低的摩擦导致较低的 CFJS 为 95.6 mm/s(1.47 体长/秒)。目前,这限制了该机器人在相对光滑的表面上跳跃的应用。
研究人员表示,LSJR 可通过连接光和软温度传感器、膏和光致变色染料等,用于检测和记录环境变化,如温度和紫外线,也可通过集成其他传感器,用来检测更多的环境因素,如工业环境和民用建筑中的污染物。
下一步工作,他们将着重研究 sEHBA 的可扩展性和参数优化,以实现更好的跳跃性能,开发无约束 LSJR 和应用,以及基于 sEHBA 的其他软机器人,如爬墙机器人、游泳机器人、还有扑翼机器人等。
https://www.nature.com/articles/s41467-021-27265-w
热门视频推荐
添加学术君微信 xueshujun01
备注“昵称+视频号名称+兴趣领域”
加入「短视频爱好者2群」交流群

剑桥大学发明“超级果冻”:咋碾都不碎,果冻中的诺基亚!
登录查看更多
相关内容

Arxiv
0+阅读 · 2022年4月18日




相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月18日