基于移动机器人的拣货系统研究进展
基于移动机器人的拣货系统(Robotic mobile fulfillment systems, RMFS)作为一种新型物至人的拣货系统, 相比人工拣货系统和AS/RS拣货系统(下文统称传统拣货系统)具有更高的拣货效率、更好的系统可扩展性和柔性. 为全面了解RMFS的运行模式及其优化方向, 本文首先回顾了RMFS的工作流程及优化理论框架, 然后对RMFS的货位指派、订单分批、任务分配、路径规划以及建模方法等问题进行了文献回顾和总结, 并指出了RMFS与传统拣货系统在拣货过程方面的异同及当前研究的不足. 最后, 讨论了RMFS的几个重要研究方向, 为RMFS的理论研究和应用实践提供参考.
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190728
订单拣选是将商品从其存储位置拣出以满足客户订单需求的过程, 订单拣选是典型的劳动密集型作业, 占仓库运作总成本的60% ~ 70%[1]. 随着客户需求从大批量少批次向小批量个性化转变, 客户对订单的配送时限和服务质量要求越来越高, 提升订单拣选效率已成为当今学术界和工业界共同关心的难题. 基于移动机器人的拣货系统(Robotic mobile fulfillment systems, RMFS)的订单拣选效率是传统拣货系统的2 ~ 3倍[2–3], 彻底颠覆了传统仓库的拣货作业模式, 为仓库的广泛应用和研究开辟了新途径.
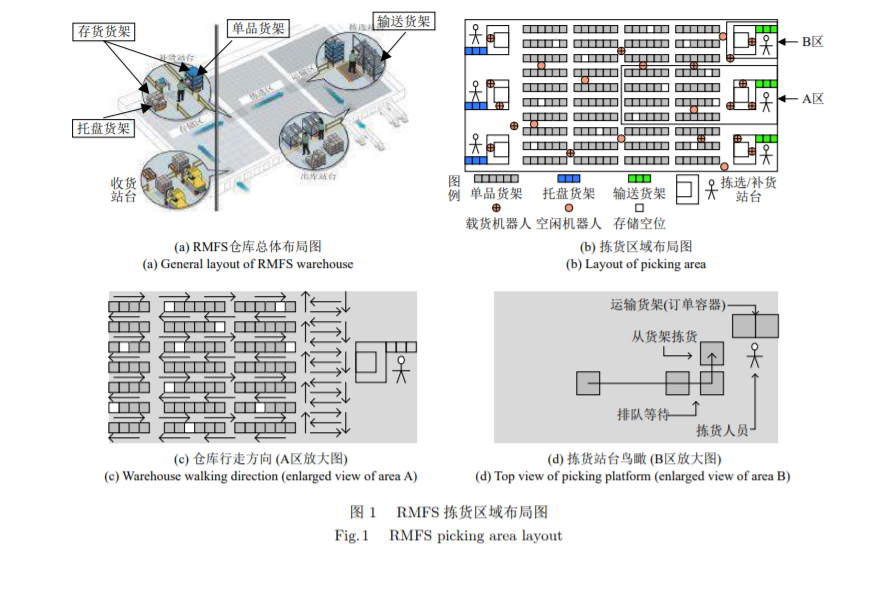
RMFS系统2003年由Kiva公司最先开发, 2012年亚马逊收购Kiva后在其北美各大配送中心开始部署[4–5], 国内已有菜鸟、京东和快仓等公司成功应用RMFS. RMFS的核心思想是利用移动机器人将存储商品的移动式货架搬运到拣货站台, 拣货人员拣取商品后再由机器人将货架送回存储区存储. 相比传统拣货系统, RMFS提高了拣货效率、准确性以及仓库空间利用率, 缩短了仓库部署和调试时间, 并可根据客户需求的变化实时、动态调整仓库布局结构, 特别适合需求波动性大、时效性强的电商企业的订单拣选[2–3, 6].
与传统拣货系统类似, RMFS也面临货位指派、订单分批、任务分配以及路径规划等方面的问题, 但在实际运作过程中, RMFS与传统拣货系统相比存在诸多不同, 面临一些新的亟需解决的问题. 鉴于此, 本文对RMFS订单拣选过程的几个关键问题进行综述研究, 并给出未来的研究方向, 为RMFS的实践应用及学术研究提供参考.
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“RFMS” 就可以获取《基于移动机器人的拣货系统研究进展》专知下载链接






