【学科发展报告】无人车

无人车是指通过车载传感系统感知环境,自动规划行车路线并控制车辆实现预定驾驶目标的智能汽车。依据自动驾驶程度的不同,美国高速公路安全管理局(NHTSA)将无人车划分为 5 个层次,而美国汽车工程师学会(SAE)则将智能汽车划分为 6 个层次[1]。虽然这两种划分方式在细节上存在差异,但是它们都是从低层次的普通无智能车辆,逐步过渡到最高层次的全自动无人车。
近年来,传统汽车车厂与互联网企业选择了两条不同的道路来发展无人车。传统汽车厂商希望先发展先进辅助驾驶系统(ADAS),再逐步过渡到人车协同驾驶,最终实现无人车。而互联网企业,则希望从低层次的普通无智能车辆一步跳跃式发展至全自动无人车。随着工业界对无人车的投入力度加大,无人车相关研究也获得了大量研究者的关注。因此,本报告围绕无人车的环境感知、决策和控制三个主要方面,介绍近几年国内学者在无人车领域的主要研究进展,分析国际学科发展趋势及国内的研究特色与差距。
二、我国无人车的发展现状
(一)无人车的环境感知
感知系统是无人车系统的重要组成部分。感知主要是指运用传感器、定位与通信等技术,来获取、整合车辆行驶时外部环境信息。其主要功能包括车道检测、交通参与者检测(车辆、行人等)、交通标志检测和其他车外环境检测等。
1. 车道检测
近年来研究者提出了多种车道检测方法。例如,清华大学的研究者采用了一种基于颜色信息的方法,利用道路尺寸形状和动态信息检测车道,可以很好地将遮挡和真实的车道线区分开[2]。常见的方法对于结构化道路效果较好,但在车道线并不一定清晰或存在的情况下容易误判。因此,目前很多研究机构将重心更多转移到了对非结构化道路的检测 , 即对二级道路或越野道路的检测。
2. 交通标志检测
交通标志检测主要包括两个基本环节:交通标志的检测和判别[3,4]。目前常用的交通标志检测方法包括边缘检测、颜色分割[5]等;而常用的交通标志判别方法,主要方法包括基于神经网络[6]、基于形状(模式匹配)[7]和基于颜色等方法。目前,越来越多的研究将重心转向神经网络方法,普遍可以达到95% 以上的识别率。
3. 车辆检测
车辆检测可使用毫米波段雷达、视觉传感器等多种设备。中国科学院自动化研究所的研究者对于最近几年该领域的研究方法进行了很好的总结[8]。目前主要的检测过程大致分为三步:
(1)假设产生,即定位感兴趣的区域。常用方法有基于二维图像的先验知识、基于立体视觉、基于运动产生的光流等。
(2)假设验证,即核实车辆是否存在。常用方法有基于显性规则(基于模板)和基于隐形规则(基于外观)两种。
(3)车辆跟踪[9],需要根据先前帧的车辆位置推测出现在的车辆位置。
由于摄像头采集的本质是三维环境在二维投影上的表征,不可避免地会损失部分深度信息,因此近年来基于立体视觉技术的道路图像采集得到更多的关注。相对于视觉传感器,毫米波雷达的优点是不受光线、天气等因素的干扰,因此与图像数据融合后可以得到更准确可靠的检测结果。
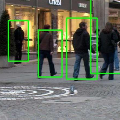
4. 行人检测
近年来,研究者提出了多种基于视觉传感器和红外线传感器的行人检测方法。其过程可分为三步:行人定位[10]、行人识别与行人跟踪。行人定位方面,我国中科院电子所提出了基于色彩分层模型的实时多目标鲁棒跟踪算法[10]。行人识别方面,香港中文大学使用卷积神经网络将错误率降至 11%[11],而中科院计算研究所[12]同时最小化经验风险与表征学习风险,区别化学习不同人体结构特征,并以此提高行人识别率。行人跟踪方面则主要使用卡尔曼滤波、Condensation 算法和动态贝叶斯网络等方法。特别是随着深度学习技术的成功应用,行人检测的精度在最近几年中有了显著的提高。
5. 联合检测
为了应对单个传感器数据可靠性低、有效探测范围存在盲区等局限性,目前在无人车感知系统构建时,一般使用多种传感器进行数据采集,利用多传感器信息融合技术对检测数据进行分析、综合与平衡,通过互补特性增强容错性,从而得到所需要的检测信息。
(二)无人车的决策
当前无人驾驶决策主要研究短期轨迹规划。目前,该领域的研究的热点与难点主要集中在如何合理考虑车辆动力学特征、避撞以及节能舒适三类约束,规划有效的轨迹。
1. 考虑车辆动力学特性约束的无人驾驶轨迹规划
轨迹规划需要充分考虑车辆动力学系统具有高度非线性、时变性以及各类机械约束等特点,保证轨迹的可行性[13,14]。清华大学[13]的研究者基于车辆运动学特性进行车辆轨迹规划,其控制率简单、易实现。吉林大学[14]的研究者在研究无人驾驶动力学特性约束时,提出了载荷转移率等高线图以及载荷转移率防侧翻指标,并验证了其作为无人驾驶轨迹规划的侧倾约束指标的有效性。
2. 考虑障碍物避撞的无人驾驶轨迹规划
避障主要研究如何搜寻可供轨迹规划的空间,进行动作决策,最后规划车辆轨迹以避免行驶过程中发生碰撞。国防科技大学的研究学者就采用激光雷达检测障碍物以确定原始运动轨迹,并采用共轭梯度非线性最优化算法以及 Bezier 插值方法修正原始运动轨迹,最终实现避障轨迹规划[15]。
3. 考虑能耗和舒适度的无人驾驶轨迹规划
驾驶员在不同道路工况下,对时间、距离、能耗以及舒适度等要求的偏重不一。在实际应用中,如何针对不同情况综合考虑这些轨迹规划目标,是目前的研究难点之一。时间最短或轨迹最短的行驶轨迹并不一定具有最低能耗和最佳舒适度。香港城市大学[16]的研究者从能耗的角度出发,提出以最高能量效率为优化目标的轨迹规划算法,进行轨迹和速度规划。清华大学[17]的研究者提出了计算受试车辆的加速度变化给出舒适性指标的评估方法。
(三)无人车的控制
智能汽车的无人化使得车辆在融合自身状态、路面交通等信息的基础上,在满足横向稳定性的前提下实现运行轨迹跟踪的自动控制。其中,轨迹跟随控制主要是研究如何通过控制车辆的转向系统以及制动/ 驱动系统使得车辆能够以期望的速度沿着期望的路线行驶, 从而实现车辆的无人驾驶操作。
1. 车辆轨迹跟踪控制
考虑到很难建立精确的车辆动力学模型、行驶的工况复杂多变,车辆轨迹的精确跟随控制具有极大的挑战。目前绝大部分关于轨迹跟随的研究方法中,从原理上讲主要是由预瞄理论和模型预测理论衍生而来。
基于最优预瞄控制理论的算法可以分为两类:
一类是基于预瞄假设以及最优曲率控制原则,即驾驶员根据前方轨迹一点的信息和当前汽车的运动状态估计得到的到达该预期点的误差,计算出一个最优的圆弧轨迹,并由轨迹圆弧曲率与转向盘转角的对应关系来确定方向盘的转角输入[18]。由于使用的是几何车辆运动模型,而几何车辆运动模型仅在车速较低的情况下才能比较真实的代表实际的车辆响应,所以该方法只适用于低速工况下的轨迹跟随控制。
另一类方法是以车辆的动力学模型为基础,通过建立最优的圆弧轨迹与车辆期望的运动学或动力学物理量,然后对其进行反馈跟踪控制,从而间接实现最优的轨迹跟随控制。合肥工业大学结合车辆道路相对位置以及车身状态信息,设计了期望横摆加速度生成器[19];吉林大学根据预瞄—跟随驾驶员模型理论,对侧向和纵向都建立了基于加速度反馈的跟随控制算法[20]。与此同时,美国多所高校和企业合作将这种方法应用于参加DARPA 挑战赛的无人驾驶汽车的上层控制中[21],无论是在车速较高的行驶工况还是在道路环境比较复杂场景中,都能够取得比较好的控制效果。
2. 车辆纵向节能控制
相比较于传统车辆,无人驾驶智能车在纵向运动过程中通过节能优化能够有效降低汽车能源消耗。一方面从速度规划的角度来讲,通过一定的优化策略对车辆驾驶进行决策和综合优化[22-24],可以达到降低能耗的目的,另一方面,可以将车辆的速度和动力传动控制结合起来以提高整车效率[25-28]。随着信息获取程度的不断加深,车辆纵向节能控制可以分为三个不同的阶段:不考虑道路和交通信息的单车纵向速度控制、考虑道路和交通信息的单车纵向速度控制及基于车—车、车—路通信的多车纵向速度控制。
目前实际应用于汽车上的纵向速度控制系统多数为没有考虑道路和交通信息的单车优化系统。主要集中于改善发动机工作点、挡位在线优化以及油门和制动踏板操作合理化等[29-31]。传统的自适应巡航控制系统主要针对的是驾驶舒适性和行驶安全性,没有考虑车辆行驶的经济性,北京理工大学学者基于车辆行驶经济性,在自适应巡航控制过程中研究车辆加速过程的经济性策略,构建出以发动机油耗为性能指标的最优控制问题[32]。清华大学采设计了以降低油耗为目标的分层式自适应巡航控制器,实验表明该策略在节能和跟踪方面具有很好的效果[33]。
车联网和地理信息系统在汽车以及交通系统中的充分应用,使车辆不再是交通系统中的单独个体,而是与外界车辆和基础设施有着信息联系的具有高度自动化的行驶工具。车辆纵向速度控制从单个车辆轨迹和能量优化逐渐扩展到多车纵向速度协调控制。车辆纵向速度控制如何对智能交通系统的上层调度进行配合,实现车辆纵向速度控制与交通系统智能化的整合与提升,也是当前研究的技术热点[34,35]。
3. 车辆横向稳定性控制
无人驾驶智能车横向稳定性控制是以传统的车辆稳定性控制基础上提出来,主要通过两种技术途径实现。一种是基于转向的稳定性控制系统;另外一种是直接横摆力矩控制, 能够通过改变左、右两侧车轮的纵向力产生附加的横摆力矩来控制车辆的稳定性。
基于转向的稳定性控制系统主要包括前轮转向控制、后轮转向控制以及四轮转向控制。对于前轮转向,日韩研究人员基于侧向轮胎力反馈提出了主动前轮转向控制,通过控制侧向轮胎力保证了转弯的稳定性并能很精确的预测车辆的状态[36];我国学者将主动前轮转向控制和直接横摆力矩控制结合起来,构成了底盘集成控制系统[37]。
直接横摆力矩控制主要通过控制内侧和外侧车轮的纵向力矩分配来控制车辆的横摆力矩,进而提高车辆的稳定性。欧美学者应用模型预测控制理论对主动前轮转向及差动制动的协调控制进行了研究[38];日韩学者采用动态逆的方法对集成控制进行了研究[39]。为了提高车辆的横摆稳定性,增益可调的 LPV 控制律被用来设计集成控制器,并基于 LMI 框架对控制器进行了分析[40]。吉林大学提出了一种基于模型预测控制、采用分层集成控制结构的控制算法,并研究了基于二次规划的驱动力分配方法[41]。
三、国内外发展比较
国内无人驾驶技术的发展呈现百花齐放、百家争鸣的态势,在一些方面取得了全球领先的进展。由国家自然基金委员会资助,自 2009 年起每年举办的“中国无人智能车未来挑战赛”是目前国际上持续时间最长的无人车比赛,吸引了来自众多国内高校及研究所参赛,极大地推动了国内无人车技术的发展。2016 年,清华大学、西安交通大学和中国科学院自动化研究联合推出了新的无人车智能测试理论、评价系统和量化评估方法,在2016 年和 2017 年的“中国无人智能车未来挑战赛”取得了成功应用[17]。
目前,传统车厂基本都采用分解式设计,从环境感知,决策和控制三方面分别研发无人车的算法实现。而一些新兴互联网企业开始采用端对端式来实现无人车,接受输入感知的图像等信息直接输出控制命令。而无论是哪种方式都越来越多地借助深度学习技术。国内的无人车研发机构和创业公司在这两方面都展开了研究。
但整体来看,无论是实验行驶距离还是人工干预程度,国内的无人驾驶技术相较国外依然存在差距,特别是国内的相关硬件研发明显滞后于国外,专用的计算芯片和一些特定传感器的研发尚待奋起直追。
四、我国发展趋势与对策
虽然目前无人车产业化仍存在各种问题,但市场对于汽车主动安全技术、智能化技术的持续增长的需求,推动了无人驾驶技术由辅助驾驶逐步向完全无人化演进。当前,国内外对于无人车前景普遍表示乐观。
我国无人车借此东风,正在如火如荼地发展中,众多新兴无人车创业公司如雨后春笋般成立起来。但可以预见的是,无人车的研发到应用的过程可能会持续相当长的时间,需要大量人才和资金的投入。希望在人工智能大潮的背景下,各大高校向无人车领域适当关注,引领更多学子投入相关研究,为无人车的发展做好人才储备。
在可预期的未来,随着传感器技术及计算机技术的发展,无人驾驶汽车使用的各种传感器(如激光雷达等)在性能上将会取得很大提升,价格也将大幅降低,满足一般消费者的承受能力 , 这将会进一步地推动无人驾驶车的市场化。
五、结束语
本报告围绕无人车的环境感知、决策和控制三个主要方面,介绍国内主要研究进展, 分析国际学科发展趋势及国内的研究特色与差距。总结起来,国内学者在无人驾驶研究上取得了一批国际水平的成果,但在以后的工作中还需要更加深入推进相关理论和技术的研发,并积极推进相关人才培养。
来源:中国自动化学会
往期文章推荐

🔗【重要通知】中国自动化学会关于开展“2018-2020青年人才托举工程项目”推荐工作的通知
🔗【重要通知】关于举办2018中国智能车大会暨国家智能车发展论坛的通知
🔗【问卷调查】关于开展全国学会分支机构基本情况问卷调查的通知
🔗【学会新闻】中国科协第363次青年科学家论坛成功召开
🔗【CAC2018】2018中国自动化大会论文及注册相关问题答复(Q&A)
🔗【CAC 2018】2018年中国自动化大会“智能自动化新技术” 展览邀请函
🔗【学会新闻】中国科协智能应对老龄化社会CAA专家学者亮相2018 中日科学家高层对话
🔗【会员服务】中国自动化学会会员:现可免费申请IEEE Xplore数据库及InnovationQ Plus专利检索分析工具试用!