DroneVehicle:天津大学推出大型无人机航拍车辆数据集
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
无人机已经越来越走入人们的生产和生活,使用无人机进行新闻报道、城市管理、治理监控也成为社会发展重要新趋势。
我在南京的报纸上就看到过南京市对拟拆迁区域使用无人机监控新增违建,效率大增。
对于城市管理,交通道路车辆其实是重头戏,基于无人机航拍图像的车辆检测和计数让交管部门拥有天眼。
近日,天津大学的学者发布了论文Drone Based RGBT Vehicle Detection and Counting: A Challenge,公布了他们收集、标注的大型无人机航拍车辆数据集DroneVehicle,相信将会极大的方便该领域的研究开发者。
该数据集面向的视觉任务:
车辆检测;
车辆计数。
其特点有:
拍摄环境涵盖从白天到晚上;
同时有RGB图像和红外图像;
共有15532对(31064幅)图像,含 441642个标注实例;
含有真实环境的遮挡和尺度变化。
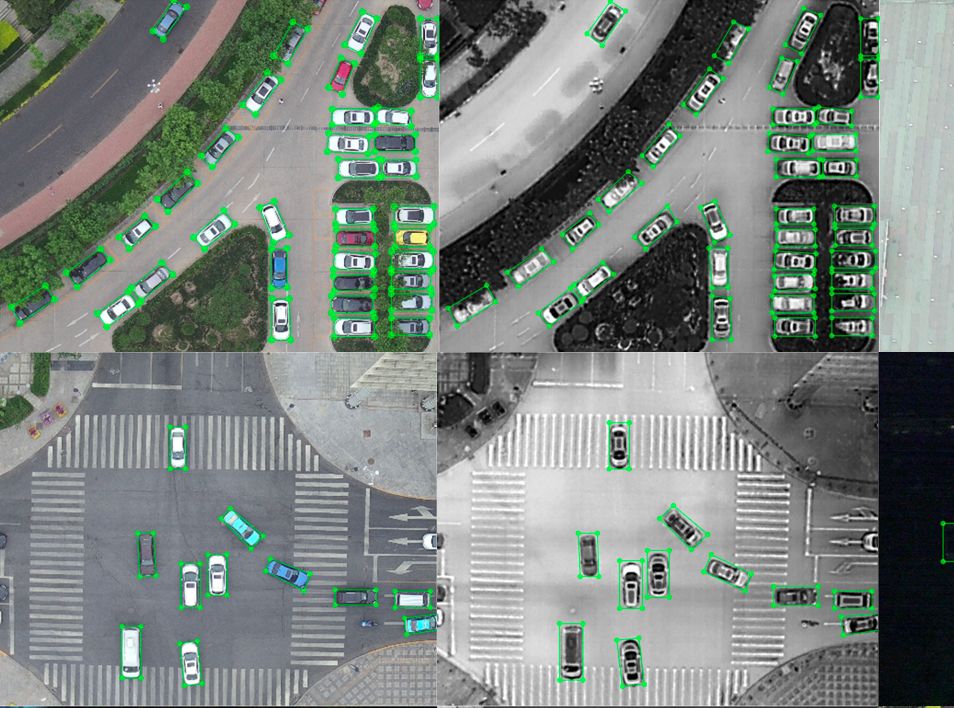
图像示例:

标注示例:
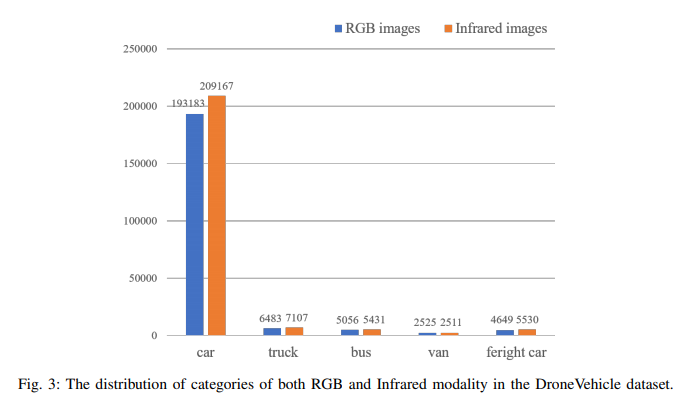
分类别的目标统计:
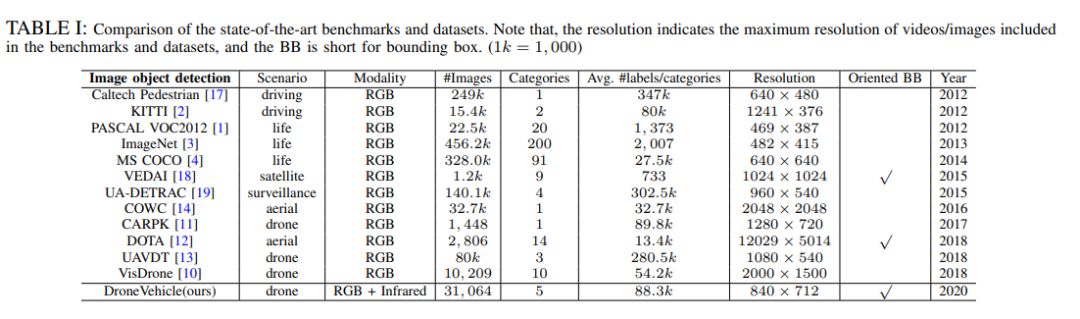
与其他大型视觉基准数据集的比较统计:
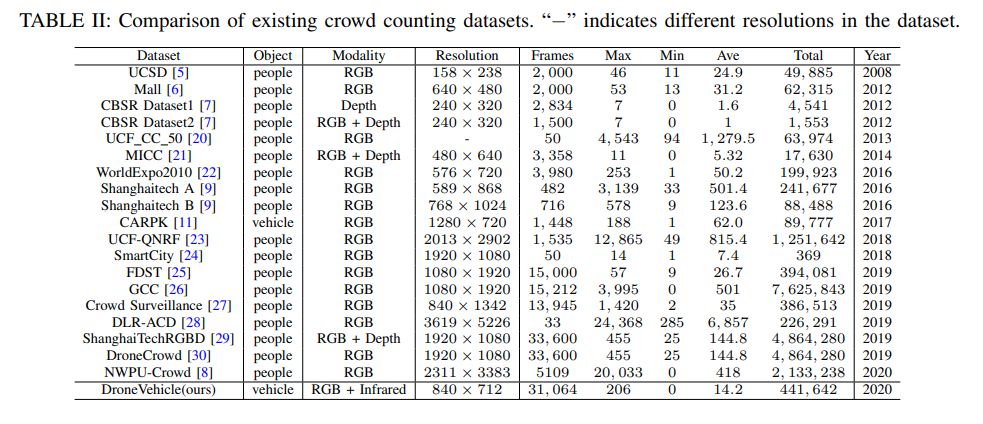
与其他人群和车辆计数数据集的比较:
总之,DroneVehicle 在无人机航拍图像识别分析领域具有独特价值,希望更多人能参与到这个方向的研究中来。
论文地址:
https://arxiv.xilesou.top/pdf/2003.02437.pdf
DroneVehicle 数据集地址:
https://github.com/VisDrone/DroneVehicle.
(目前还未公布数据下载方式)
从零开始学习三维视觉核心技术SLAM,扫描查看介绍,3天内无条件退款

交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life
欢迎加入从零开始学习SLAM知识星球,详见:如何从零开始系统化学习视觉SLAM?
推荐阅读
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
从零开始一起学习SLAM | 用四元数插值来对齐IMU和图像帧
给优秀的自己点个赞




