2019 IROS—终生机器视觉数据集全球挑战赛

IROS会议介绍
赛事背景
聚焦机器视觉前沿领域,旨在通过比赛探索,赋予AI终生学习能力。
人类:持续从环境和经验中学习知识和技能
机器人:需要终生学习能力以适应变化的环境和任务
计算机视觉:从预先建好的数据集中一次性学习
近年来,如ImageNet和COCO等大型数据集的新进展使得基于深度学习的计算机视觉技术显著提高。目前基于大量数据集的物体检测,分割和识别的计算机视觉应用也在智能家居、安防、工业检测等领域做出了突出的贡献。然而,机器人视觉对于视觉算法的开发和落地提出了新的挑战。计算机视觉算法隐含地对数据进行了独立同分布的假设,比如固定的类别,和单一简单的任务。很明显,真实环境的语义概念会随着时间的推移而动态变化。在实际应用的场景中,机器人需要长时间持续运行在可变的环境中,这就需要机器人拥有终身学习的能力去适应环境的改变。
针对研究之一:Lifelong SLAM


针对研究之二:Lifelong Learning
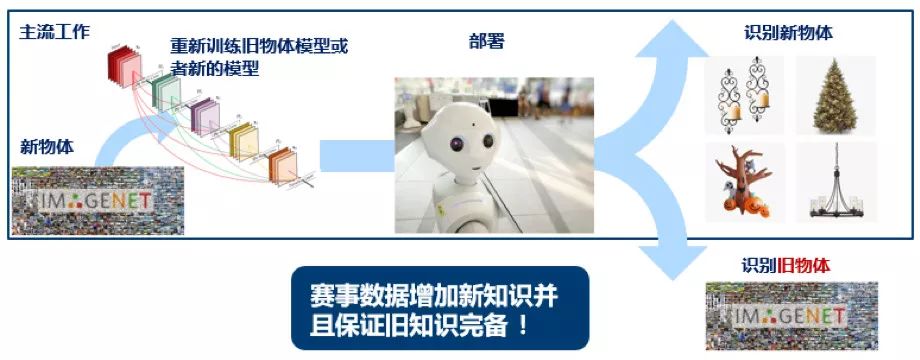
终生机器视觉数据集:OpenLORIS



机器人和人工智能最热门领域的顶级国际赛事
大赛流程
注册报名竞赛
下载数据集
开发算法, 使用数据集提高算法
下载竞赛数据集,软件工具,在截止时间前上传结果
高分团队晋级决赛并邀请参加IROS赛场线下活动
决赛将会使用指定新的数据集
参赛算法将需在指定的计算环境中运行
参赛报告与特邀报告
最终比赛成绩宣布
获奖团队将于IROS 2019颁奖午宴授奖
报名方式
🔍
现在,在「知乎」也能找到我们了
进入知乎首页搜索「PaperWeekly」
点击「关注」订阅我们的专栏吧
关于PaperWeekly
PaperWeekly 是一个推荐、解读、讨论、报道人工智能前沿论文成果的学术平台。如果你研究或从事 AI 领域,欢迎在公众号后台点击「交流群」,小助手将把你带入 PaperWeekly 的交流群里。

▽ 点击 | 阅读原文 | 立刻报名
登录查看更多
相关内容

IEEE\RSJ International Conference on Intelligent Robots and Systems(IROS 2019)包括全体会议和主题演讲、技术会议、研讨会和教程、论坛、先驱演讲和展览,以丰富与会人员之间富有成果的讨论。它是机器人与智能系统领域的旗舰国际会议,由IEEE、IEEE机器人与自动化协会(RAS)、IEEE工业电子协会(IES)、日本机器人协会(RSJ)、仪器与控制工程师协会(SICE)和新技术基金会(NTF)共同赞助。IEEE是一个非盈利的技术专业协会,在160个国家拥有40多万会员。它是从计算机工程、生物医学技术和电信到电力、航空航天和消费电子等技术领域的领先权威。官网链接:https://www.iros2019.org/
Arxiv
5+阅读 · 2018年9月6日
Arxiv
11+阅读 · 2018年4月2日
Arxiv
6+阅读 · 2018年1月24日




相关VIP内容
相关资讯
相关论文
Arxiv
5+阅读 · 2018年9月6日
Arxiv
11+阅读 · 2018年4月2日
Arxiv
6+阅读 · 2018年1月24日