/ 导读 /
卡耐基梅隆大学(Carnegie Mellon University)的研究人员开发了一种新的衡量自动驾驶汽车对不断变化的交通状况的反应能力的标准,这使比较感知系统的准确性和反应时间首次成为可能。
![]()
研究背景
在自动驾驶领域,存在这样一个典型的矛盾问题——学术研究人员往往更倾向于开发复杂的算法,以准确地识别危险,但这往往需要大量的计算时间。相比之下,工程师往往更喜欢简单、不那么精确的算法,这种算法速度快,需要的计算量少,这样自动驾驶车辆就能更快地对危险做出反应。
这个问题不仅仅存在自动驾驶领域,这也是任何需要对动态世界进行实时感知的系统的问题。到目前为止,还没有系统的方法来平衡准确性和反应时间。缺乏恰当的度量标准使得业内人士很难评价比较竞争系统。
![]()
新方法简介
这种新的测量方法被称为“流感知精确度”,该论文Towards Streaming Perception在计算机视觉虚拟欧洲会议(ECCV2020)上获得了最佳论文荣誉奖。
![]()
-
ECCV每两年举行一次,与国际计算机视觉会议交替举行。与ICCV和CVPR一样,被认为是计算机视觉领域的重要会议。
![]()
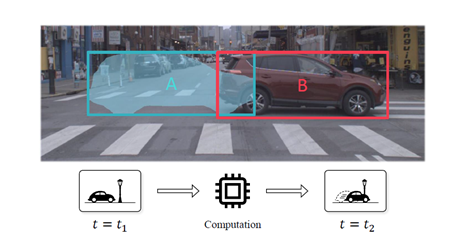
流感知精度是通过比较感知系统在每一刻的输出与地面真相的世界状态来衡量的。
研究人员解释说:“当你完成对传感器输入的处理时,世界已经改变了。”他指出,处理过程发生时,汽车已经行驶了一段距离。
![]()
测量流感知的能力为现有的感知系统提供了一个新的视角。根据经典的性能衡量,性能良好的系统在流感知上可能表现得很差。使用新引入的度量来优化这样的系统可以加强其反应性。该团队研究发现,该方法不一定是让感知系统运行得更快,而是偶尔适当地暂停一下。跳过某些帧的处理可以防止系统越来越落后于实时事件。
另一个观点是在感知过程中加入预测方法——即车辆可以预测其他车辆和行人的一些动作。该团队的流式感知测量显示,进行这些预测所需的额外计算并不会严重影响预测的准确性或增大延迟。
直观地说,流基准不再计算函数,而是计算连续时间框架内的可执行代码段。
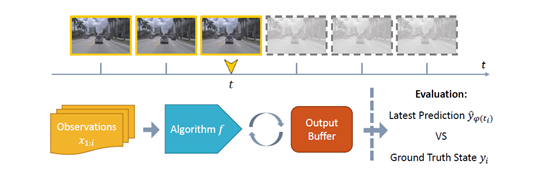
该代码可以访问存储最近图像帧的传感器输入缓冲区。代码负责维护一个输出缓冲区,该缓冲区表示对世界状态的最新估计。基准测试检查这个输出缓冲区,将其与实际世界状态的地面状态流进行比较。
![]()
上图为流式感知评估。
流媒体算法f提供直到当前时间t的(时间戳)观察,并用它对当前世界状态的最新预测刷新输出缓冲区。与此同时,基准程序不断地向输出程序查询世界各国的估计数。至关重要的是,f必须考虑在进行计算时应该忽略的流观测量。
以下几段视频为该研究团队的实验成果。
智车科技后台回复“Streaming”获取论文。
Single GPU vs Infinite GPUs
https://www.sciencedaily.com/releases/2020/09/200909085937.htm
http://conference.researchbib.com/view/event/112522
下载1:动手学深度学习
在CVer公众号后台回复:动手学深度学习,即可下载547页《动手学深度学习》电子书和源码。该书是面向中文读者的能运行、可讨论的深度学习教科书,它将文字、公式、图像、代码和运行结果结合在一起。本书将全面介绍深度学习从模型构造到模型训练,以及它们在计算机视觉和自然语言处理中的应用。
![]()
下载2:CVPR / ECCV 2020开源代码
在CVer公众号后台回复:CVPR2020,即可下载CVPR 2020代码开源的论文合集
在CVer公众号后台回复:ECCV2020,即可下载ECCV 2020代码开源的论文合集
重磅!CVer-论文写作与投稿交流群成立
扫码添加CVer助手,可申请加入CVer-论文写作与投稿 微信交流群,目前已满2300+人,旨在交流顶会(CVPR/ICCV/ECCV/NIPS/ICML/ICLR/AAAI等)、顶刊(IJCV/TPAMI/TIP等)、SCI、EI、中文核心等写作与投稿事宜。
同时也可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如论文写作+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
![]()
▲长按加微信群
![]()
▲长按关注CVer公众号
整理不易,请给CVer点赞和在看!![]()