关于神经网络,一个学术界搞错了很多年的问题

文 | 五楼@知乎
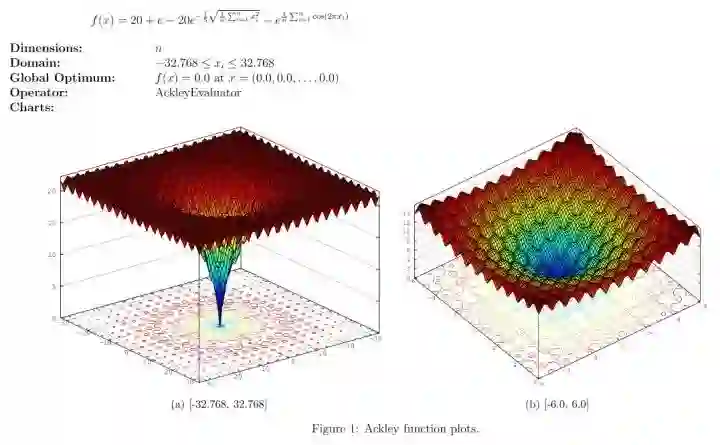
说一个近年来神经网络方面澄清的一个误解。BP算法自八十年代发明以来,一直是神经网络优化的最基本的方法。神经网络普遍都是很难优化的,尤其是当中间隐含层神经元的个数较多或者隐含层层数较多的时候。长期以来,人们普遍认为,这是因为较大的神经网络中包含很多局部极小值(local minima),使得算法容易陷入到其中某些点。这种看法持续二三十年,至少数万篇论文中持有这种说法。举个例子,如著名的Ackley函数 。对于基于梯度的算法,一旦陷入到其中某一个局部极值,就很难跳出来了。(图片来自网络,压缩有点严重。原图可见Documentation/Reference/Test Functions - HeuristicLab[1])。
到2014年,一篇论文《Identifying and attacking the saddle point problem in high-dimensional non-convex optimization》[2],指出高维优化问题中根本没有那么多局部极值。作者依据统计物理,随机矩阵理论和神经网络理论的分析,以及一些经验分析提出高维非凸优化问题之所以困难,是因为存在大量的鞍点(梯度为零并且Hessian矩阵特征值有正有负)而不是局部极值。
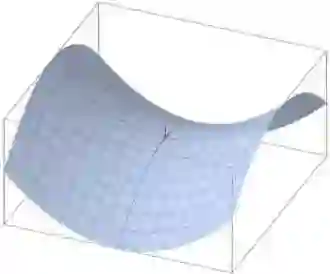
鞍点(saddle point)如下图(来自wiki)。和局部极小值相同的是,在该点处的梯度都等于零,不同在于在鞍点附近Hessian矩阵有正的和负的特征值,即是不定的,而在局部极值附近的Hessian矩阵是正定的。
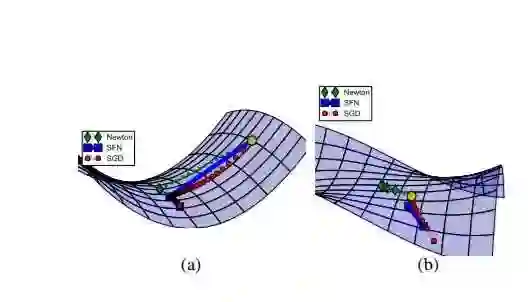
在鞍点附近,基于梯度的优化算法(几乎目前所有的实际使用的优化算法都是基于梯度的)会遇到较为严重的问题,可能会长时间卡在该点附近。在鞍点数目极大的时候,这个问题会变得非常严重(下图来自上面论文)。
这个问题目前仍有讨论,不过大体上人们接受了这种观点,即造成神经网络难以优化的一个重要(乃至主要)原因是存在大量鞍点。造成局部极值这种误解的原因在于,人们把低维的直观认识直接推到高维的情况。在一维情况下,局部极值是仅有的造成优化困难的情形(Hessian矩阵只有一个特征值)。该如何处理这种情况,目前似乎没有特别有效的方法。(欢迎评论告知)

多解释一点。
-
鞍点也是驻点,鞍点处的梯度为零,在一定范围内沿梯度下降会沿着鞍点附近走,这个区域很平坦,梯度很小。
-
优化过程不是卡在鞍点不动了(像人们以为的局部极值那样),而是在鞍点附近梯度很小,于是变动的幅度越来越小,loss看起来就像是卡住了。但是和local minima的差别在于,如果运行时间足够长,SGD一类的算法是可以走出鞍点附近的区域的(看下面的两个链接)。由于这需要很长时间,在loss上看来就像是卡在local minima了。然而,从一个鞍点附近走出来,很可能会很快就进入另一个鞍点附近了。
-
直观来看增加一些扰动,从下降的路径上跳出去就能绕过鞍点。但在高维的情形,这个鞍点附近的平坦区域范围可能非常大。此外,即便从一个鞍点跳过,这个跳出来的部分很可能很快进入另一个鞍点的平坦区域—— 鞍点的数量(可能)是指数级的。
各种优化算法在鞍点附近形态的展示,可以看动态图[An overview of gradient descent optimization algorithms][3]最下面的部分,非常生动形象。中文可见[SGD,Adagrad,Adadelta,Adam等优化方法总结和比较][4]。
有人提到了遗传算法和进化算法(EA),这里统一说一下。
先说优点,EA通常是不依赖于函数值的,而只依赖于点之间的大小关系,comparison-based,这样进行迭代的时候不会受到梯度太小的影响。看起来似乎是一个可行的路子?下面说一下缺点。
说说进化算法面对的一些普遍问题。
-
先说CMA-ES, 这是效果最好最成功的进化算法之一,尤其是在ill-conditioned 问题和non-separable 问题上。CMA-ES (Covariance Matrix Adaptation-Evolution Strategy)和EDA (Estimation of Distribution Algorithm)的特点是 model-based,他们从一个正态分布采样产生一组新解,使用较好的一部分(一半)新解更新分布的参数(mean, cov或对应的Cholesky factor,对CMA-ES来说还有一个独立步长)。CMA-ES和EDA这样基于分布的算法大体上都能从information geometric optimization (IGO) 用natural gradient 得到。IGO流的收敛性和算法本身在一类问题上的收敛性都不是问题,Evolution path更是动量的类似。然而这些方法最大的问题在于,由于依赖随机采样,当维度很高的时候采样的空间极大,需要极多的样本来逐渐估计cov ( )量级),采样产生新解的时候的复杂度是(不低于) )。EA的论文普遍只测试30,50-100维,500-1000维以上的极少,即便是各种large scale的变种也大多止步于1000。对于动辄 量级的神经网络优化,基本是不可行的。
-
DE/PSO这类算法。特点是无模型,不实用概率分布采样的方法产生新解,使用多个点(称为一个种群,population)之间的相互(大小)关系来模拟一个下降方向。这种基于种群的方法对有较多局部极值的问题效果较好,但是对ill-conditioned 问题性能较差,在non-separable+ill-conditioned问题效果有限。更进一步的,这类算法为了维持种群多样性,通常只进行两两比较(两两比较的选择压力小于截断选择,即某些新解不比父本好,但是比种群中其他解好,这样的解被丢弃了),好的个体进入下一代。然而随着维度增加,新生个体比父代好的比例急剧下降,在ellipsoid函数上100维左右的时候就已经降低到5%以下。实验研究[Differential Evolution algorithms applied to Neural Network training suffer from stagnation][5]
总体上,EA在连续优化问题上的主要问题就是搜索效率不高,相比基于梯度的算法要多 倍的搜索。与此相似的实际上是坐标下降法(coordinate descent),同样不使用梯度,同样要求多 倍的搜索。
后台回复关键词【入群】
加入卖萌屋NLP、CV与搜推广与求职讨论群
后台回复关键词【顶会】
获取ACL、CIKM等各大顶会论文集!
![]()
[1]http://dev.heuristiclab.com/trac.fcgi/wiki/Documentation/Reference/Test%20Functions
[2]https://arxiv.org/pdf/1406.2572v1.pdf
[3] http://sebastianruder.com/optimizing-gradient-descent/
[4]http://ycszen.github.io/2016/08/24/SGD%EF%BC%8CAdagrad%EF%BC%8CAdadelta%EF%BC%8CAdam%E7%AD%89%E4%BC%98%E5%8C%96%E6%96%B9%E6%B3%95%E6%80%BB%E7%BB%93%E5%92%8C%E6%AF%94%E8%BE%83/
[5]http://www.sciencedirect.com/science/article/pii/S156849461400146X
 后台回复关键词【
后台回复关键词【



