【泡泡一分钟】基于低成本IMU的浮式机器人臂角度估计
每天一分钟,带你读遍机器人顶级会议文章
标题:Angle estimation for robotic arms on floating base using low-cost IMUs
作者:Xiaolong Zhang, Eelis Peltola, and Jouni Mattila.
来源:IEEE International Conference on Robotics and Automation (ICRA),2018
编译:王丹
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文提出了一种基于低成本惯性测量单元(IMU)的浮基机器人平台连杆角估计算法。每个链路的表面都有四个IMU,并使用扩展卡尔曼滤波器(EKF)和互补滤波器(CF)来融合传感器的数据。该算法通过由六自由度轮式工作台和三自由度液压拟人臂组成的商用移动工作机进行了验证。虽然机器柴油机存在振动扰动和连杆本身的变形,但浮动底座液压臂平面运动的测量结果表明,角度估计的精度在均方根误差(rms)中显著低于1度。
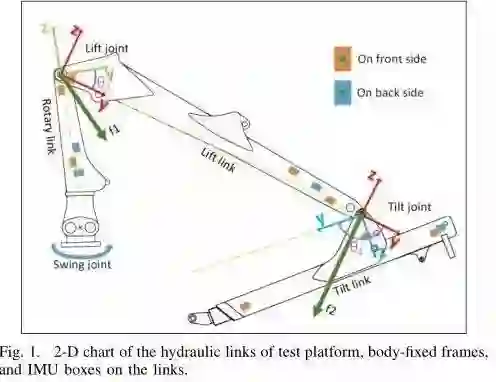
图1 测试平台、车身固定框架和连杆上IMU箱的液压连杆的二维图。
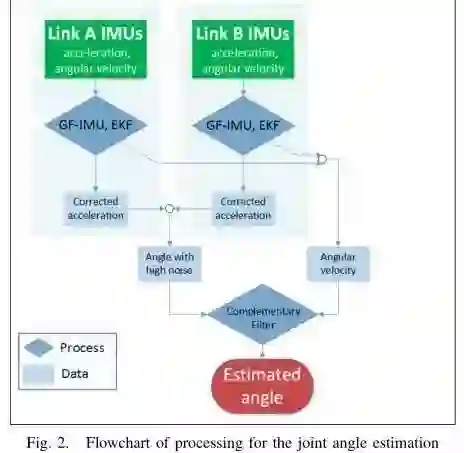
图2 关节角度估计处理流程图。
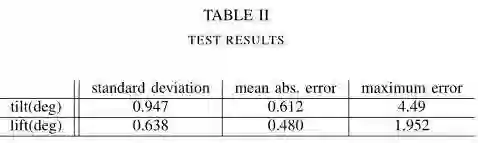
表2 测试结果
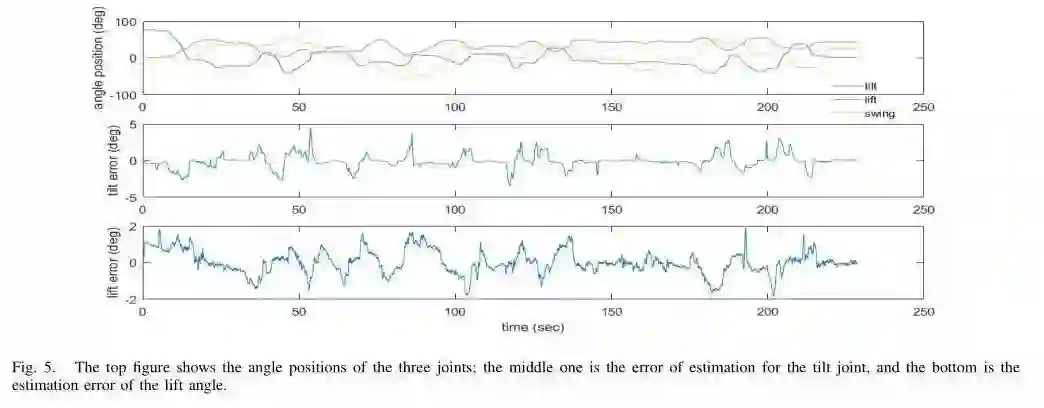
图5 上图显示了三个关节的角度位置;中间一个是倾斜关节的估计误差,底部是升力角的估计误差。
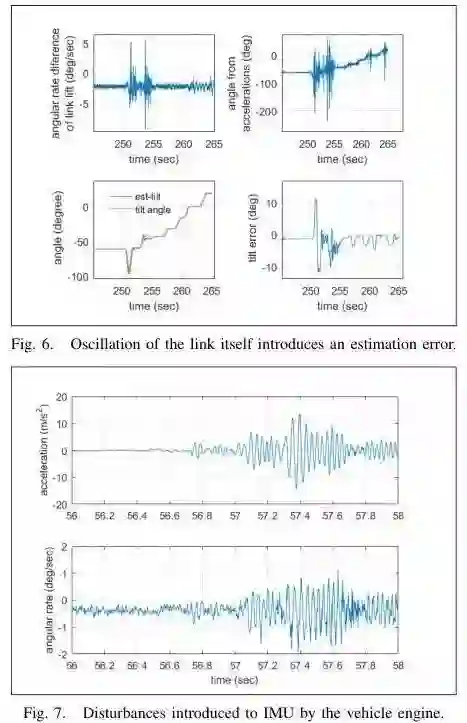
图6 链路本身的振荡会导致估计误差。
图7 车辆发动机对IMU的干扰。
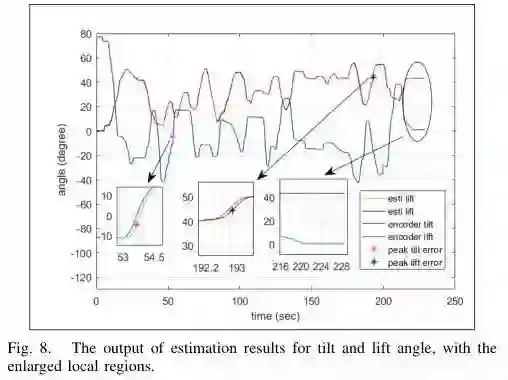
图8 倾斜角和升力角估算结果的输出,以及局部区域扩大。

Abstract
An algorithm that uses low-cost inertial measurement units (IMUs) for estimating link angles for floating base robotic platforms is proposed. Each link has four IMUs attached on its surfaces, and an Extended Kalman Filter (EKF) and a Complementary Filter (CF) are used for fusing the sensors’data. The algorithm is validated with a commercial mobile working machine, which consist of six degrees-of-freedom (DOF) wheeled base platform, and a 3-DOF hydraulic anthropomorphic arm. Although there are vibrational disturbances from the machine’s diesel engine and deformation of the links themselves, the measured results from the planar motion of a floating base hydraulic arm show that the accuracy of the angle estimation is impressively less than 1 degree in the root mean square (RMS) error.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:hsft
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



