【泡泡点云时空】SO-Net:点云分析的自组织网络(CVPR2018-19)
泡泡点云时空,带你精读点云领域顶级会议文章
标题:SO-Net: Self-Organizing Network for Point Cloud Analysis
作者:Jiaxin Li, Ben M. Chen, Gim Hee Lee
National University of Singapore
来源:CVPR 2018
播音员:孔荔
编译:田花花
审核:郑森华
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

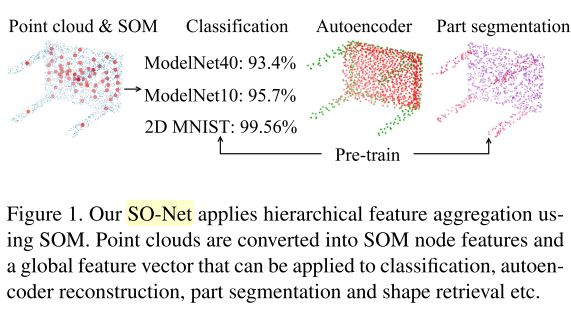
本文提出SO-Net,一种用于无序点云深度学习的置换不变网络结构。 SO-Net通过构建自组织映射(SOM)来模拟点云的空间分布。基于SOM,SO-Net对单个点和SOM节点进行分层特征提取,最终用单个特征向量来表示输入点云。网络的感受野可以通过进行点对节点的kNN(k近邻搜索)系统地调整。在识别点云重建,分类,对象部分分割和形状检索等任务中,我们提出的网络表现出的性能与最先进的方法相似或更好。另外,由于所提出的架构的并行性和简单性,所以训练速度比现有的点云识别网络快得多。我们的代码可在项目网站上找到。https://github.com/lijx10/SO-Net
简介
作为将深度学习应用于点云的先驱,PointNet仍无法充分处理局部特征提取。后来PointNet++[28]被提出来通过构建一个类似金字塔的特征聚合方案来解决这个问题,但[28]中的点采样和分组策略并没有揭示输入点云的空间分布。Kd-Net [18]从输入点云构建kd树,然后进行从树叶到根节点的分层特征提取。Kd-Net明确地利用点云的空间分布,但是仍然存在诸如感受野不重叠等限制。
在本文中,我们提出SO-Net来解决现有基于点云的网络中的问题。具体而言,建立SOM来模拟输入点云的空间分布,这使得在单独的点和SOM节点上进行分层特征提取成为可能。最终,输入点云可以被压缩成单个特征向量。在特征聚合过程中,通过在SOM上执行点到节点的k-近邻(kNN)搜索来控制感受野重叠。理论上,SO-Net通过特殊的网络设计以及我们的置换不变SOM训练来保证对输入点的顺序保持不变。我们的SO-Net的应用包括基于点云的分类,自动编码器重建,零件分割和形状检索,如图1所示。
本文的主要贡献如下:
1. 我们设计了置换不变网络 - 显式利用点云空间分布的SO-Net。
2. 通过在SOM上进行点到节点的kNN搜索,可以系统地调整感受野重叠来执行分层特征提取。
3. 我们提出一种点云自动编码器作为预训练,以改善各种任务中的网络性能。
4. 与最先进的方法相比,在各种应用中获得相似或更好的性能,并且训练速度显著加快。
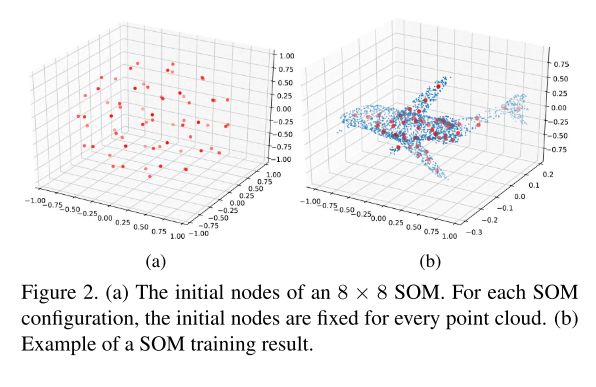
图2显示了统一的SOM节点的初始化,以及SOM在某点云上训练后的节点分布情况。
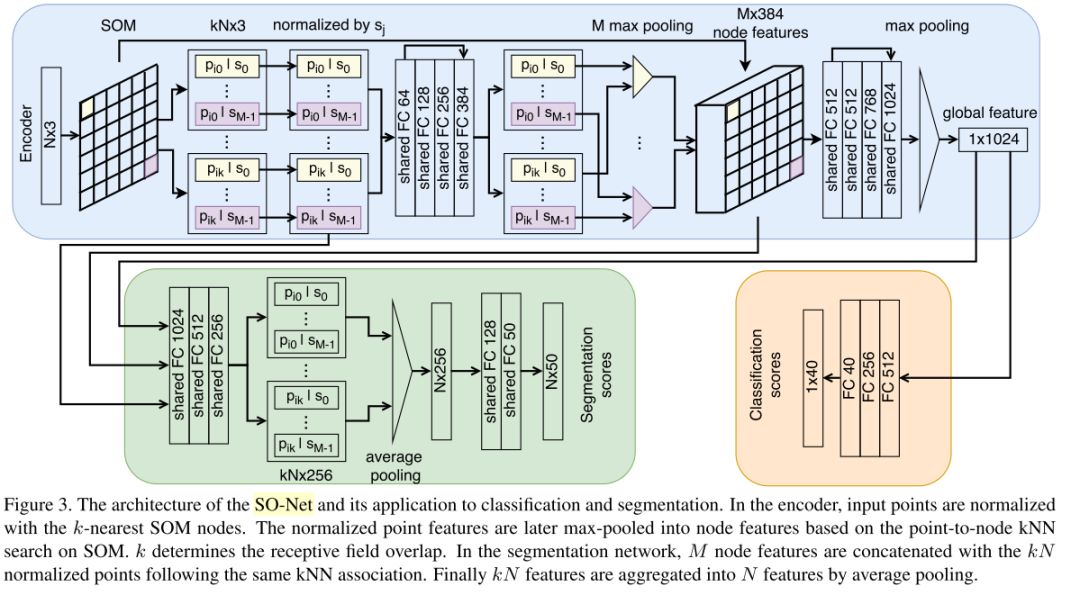
图3显示了所提出SO-Net的网络架构,以及其在分类及分割网络的应用

Abstract
This paper presents SO-Net, a permutation invariant ar-
chitecture for deep learning with orderless point clouds. The SO-Net models the spatial distribution of point cloud by building a Self-Organizing Map (SOM). Based on the SOM, SO-Net performs hierarchical feature extraction on individual points and SOM nodes, and ultimately represents the input point cloud by a single feature vector. The re- ceptive field of the network can be systematically adjusted by conducting point-to-node k nearest neighbor search. In recognition tasks such as point cloud reconstruction, clas- sification, object part segmentation and shape retrieval, our proposed network demonstrates performance that is similar with or better than state-of-the-art approaches. In addition, the training speed is significantly faster than existing point cloud recognition networks because of the parallelizability and simplicity of the proposed architecture. Our code is available at the project website
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




