说说系留旋翼无人机几个技术难点
说说系留旋翼无人机几个技术难点
系留旋翼无人机的市场需求来源于系留气球升空平台系统。
系留气球升空平台系统是为定点监测电子装备提供的空基平台。美国的TCOM公司是著名的系留气球系统的生产厂商,美国西海岸的对海警戒雷达网都是由TCOM系留气球作为空基平台部署的。

然而,系留气球体积庞大升降困难,机动性适应性都很差。业内一直在进行着,通过系缆从地面供电,由电机驱动螺旋桨替代气球作为升空动力,创新出系留旋翼升空平台系统的研究。但上个世纪稀土电机尚待开发,电机自身重量过重,功重比不足以支持系留旋翼系统的开发应用。
近年来,多旋翼无人机的快速发展,为实现系留旋翼升空平台系统提供了技术上的支持,许多无人机厂家也开展了系留旋翼系统的研发,称为系留旋翼无人机。

研发系留旋翼无人机应注重克服以下技术难点:
1、驱动电机的功重比。
功重比是指电机输出功率与电机自身重量之比,单位是千瓦/千克。根据旋翼类航空器升力/功率比的经验数值,每千瓦功率大约产生5~10千克的升力,电机的功重比低于1千瓦/千克将比较难设计系统了。
在此强调的是,电机功率指的是额定功率,而不是最大功率;电机重量包括电机和电调以及为其正常工作的冷却设备。系留旋翼必须是长期持续工作的,不象多旋翼无人机可短期间歇工作,驱动电机是动力的核心部件,一定要工作在额定的功率范围内。
2、高压供电系统。
系留旋翼和多旋翼无人机最大的区别在于供电方式不同。从地面向空中的系留旋翼平台供电必须经过一定的输电距离,采用高压供电方式可减小输送电流,从而减少电源损耗,同时可减小传输导线的截面积,减轻电源电缆的重量。
高压供电并不是电压越高越好,而要根据实际的系统要求综合考虑。一种方式是,输电电压可直接匹配高压电机,电压不需转换直接驱动电机,结构较为简单。但这种方式要进行高压电机的设计,受到电机电调大功率高压控制器件的限制,尤其在成本上难以接受。另一种方式,要在平台上设计降压用的开关电源,用多旋翼现有低压电机驱动;但开关电源同样存在功重比的要求和大功率高压控制器件的制约,也是要付出一定代价的。
3、系留系缆。
系缆除了传输动力电源之外,还设计有光纤以传输平台载电子设备的光电信号,因此系缆是一种动力/信号复合缆线。
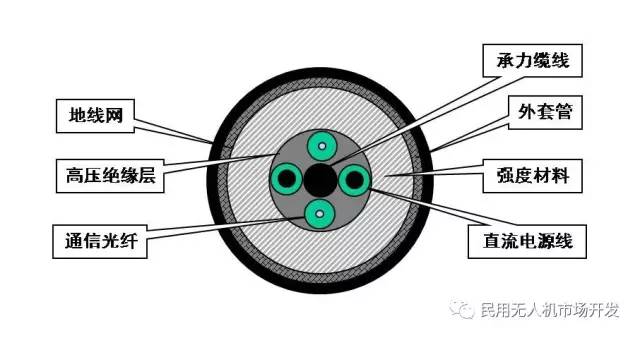
平台载电子设备为减少升空设备的重量,普遍将天线、发射机之外的设备放在地面,而通过系缆光纤保障平台与地面设备之间电子信号的连接。这样可节省出平台升力,增加升空高度,提高升空增益。
系缆自身也需要减少重量,目前可采用合金铝材料作为动力导线,比铜线要轻不少重量。
4、飞行控制功能。
系留旋翼平台主要是在定点周围悬停,不会有过多复杂的飞行动作。这看上去比多旋翼的飞控简单,其实并非如此。系留旋翼的飞控需要充分考虑系缆对其飞行的影响,尤其是在各种风场条件下,系缆随风产生的摆动会使平台失去控制。
民用系留旋翼无人机至少要达到恒风6级阵风8级的要求,才能有实际使用意义。在6~8级的风场中,系缆并没有固定的运动规律可言,要靠飞控对旋翼平台控制的鲁棒性来调整,难度是很大的。
5、旋翼平台气动力设计。
考虑到系统旋翼平台要在强风场中运行,平台的气动力设计就尤其显得重要。系统旋翼平台在风场中悬停,实际上相当于平台在沿来风方向做平面飞行。6~8级风速为10.8~20.7米/秒,相当于旋翼平台要有最高时速不小于75千米的能力。
要达到这样的时速,固定翼的气动力设计较为合理。近期演化出一种垂直起降固定翼无人机,实际上是多旋翼+固定翼两套动力系统简单组合,从无人机本身效益讲并不经济,但能解决特定场合固定翼起降的问题。

垂直起降固定翼的气动力设计应用于系统旋翼具有较大的优势,系留旋翼由地面供电,能源比较充足;两套动力系统在强风场中各有用途,垂直动力系统保持平台悬停姿态;水平动力系统使平台逆风飞行;固定翼外形可为平台产生升力,减轻垂直动力系统的负担。
系留旋翼无人机已经面临着广泛应用的阶段,但从能够使用到实际使用得好还有一些距离,有望业内同行共同努力创新。
源自:民用无人机市场开发
长按识别图中二维码关注我们!






