期待已久的无人机开源视觉解决方案或许终于来了
编者按:
一套好用的无人机视觉方案很多开发者已经期盼很久,这一套或许就是你想要的。
文 | 王汉洋
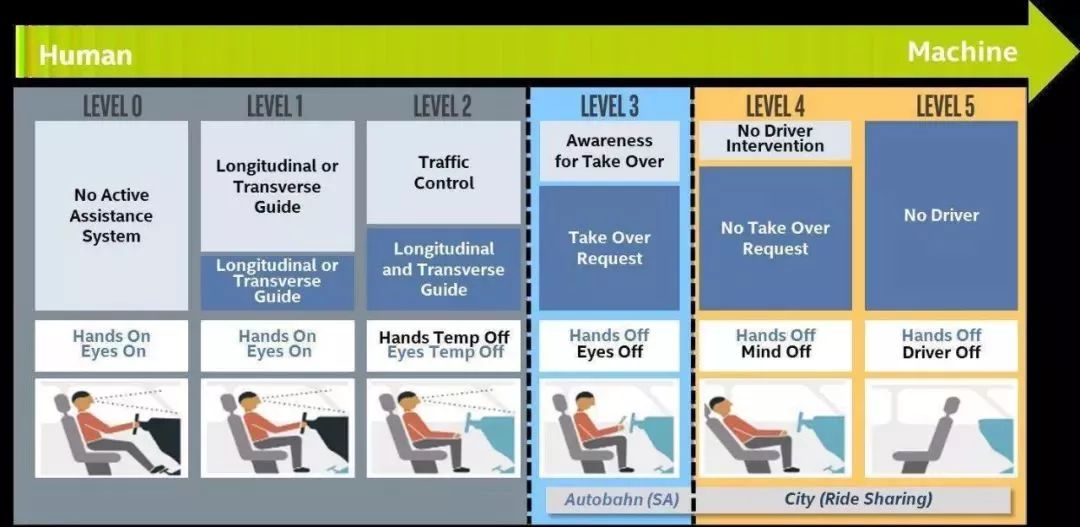
最近几年汽车自动驾驶越发先进,几年前感觉遥不可及的 Level 2 level 3 已经开始逐渐商业化,Level 5 级别的全自动驾驶也在快速推进。但反观无人机行业,虽然早年 PX4 等「自动驾驶仪」的出现让航模变身无人机,但之后就一直止步不前,距离 Level 5 似乎还遥遥无期。无人机还做不到无人。16 年时吴澄院士表示,如果把无人机产业分成十级,消费级无人机确属 1 级,捕食者也仅 2 级。三年过去了,这个现象也没有太大变化。原因就是现有无人机操控模式和自动化程度无法满足未来需求。
随着无人机硬件差异程度越来越小,软件逐渐成为了各家无人机公司的新差异点。比如 AI 识别车辆,人脸识别,自主避障,路径规划等功能则是打动客户的新亮点。但新的 AI 与 SLAM 开发与原本的无人机软件(如地面站、管理系统)开发不同,成本高周期长过程繁琐成为了阻碍无人机企业发展新软件的因素。所以,有没有类似当年 PX4 和 Ardupilot 一样的开源系统,帮助无人机公司加速软件开发呢?
近日,GitHub 上出现了一个全新的专为未来飞行器所设计的开源自动驾驶与运行管理系统 GAAS,可以帮助无人机企业解决自动驾驶的问题。GAAS(Generalized Autonomy Aviation System)包含了 SLAM、避障路径规划、飞行控制模块、计算机视觉等人工智能技术。可为无人机实现三维空间感知、三维空间避障、自主重构飞行航线、复杂任务规划、视觉里程计(VIO)、实时建模与目标跟踪等功能。无人机开发者与硬件公司可以直接通过调用相关部分来获取自己需要的功能,而无需付出高昂的开发成本。GAAS 基于对商业公司友好的 BSD-3 协议开源,与 PX4 和 Mavros 采用了相同的协议。
这里有一些非常适合直接即拿即用的解决方案,各个无人机公司可以直接用来开发产品,参加比赛。
应用场景:无 GPS 情况下自动驾驶
模拟器中无人机自主飞行、避障运行效果
GAAS 可帮助无人机在无 GPS(GPS Denied)的情况下进行自主飞行。通过三维空间感知,可以帮助无人机在桥梁巡检,室内飞行等场景中保障安全性。
2
应用场景:车辆识别
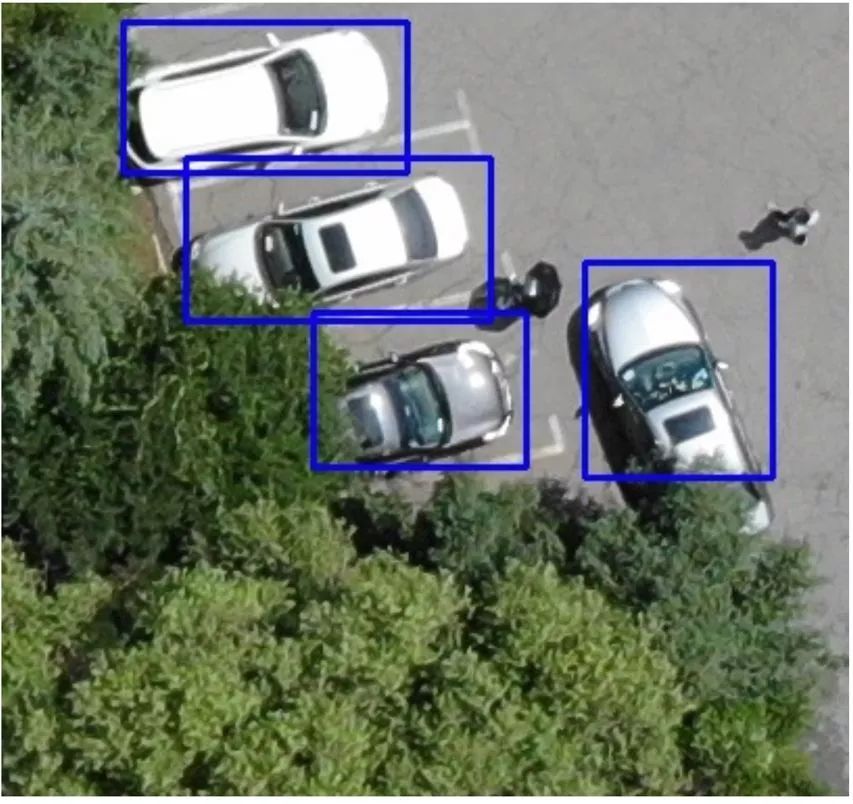
使用 Tegu 所训练的汽车识别效果图
GAAS 配套的 AI 软件 Tegu 可以在无需变的情况下,帮助开发者训练 AI 模型。
3
3D 还原重建

GAAS 3D 还原重建效果图
Pix4D 等软件虽然强大,但使用起来比较繁琐,而且收费昂贵。GAAS 自带的 3D 重建可以在绝大部分场景中提供和 Pix4D 一样的效果。
4
快速上手 GAAS
这里举一个例子,使用 GAAS 快速的搭建 Gazebo 仿真模拟器,并且使用 Offboard 控制无人机飞行。这套流程对于从零开始的团队来说,快则一周,慢的话可能需要两到三周的时间才能完成。而通过 GAAS,整套流程可以压缩在一小时之内。并且无需复杂的编程。极大简化了无人机开发速度。
首先在电脑中安装 VNC(Windows 和 Linux 都可以),然后下载包含了 GAAS 镜像的 Docker。
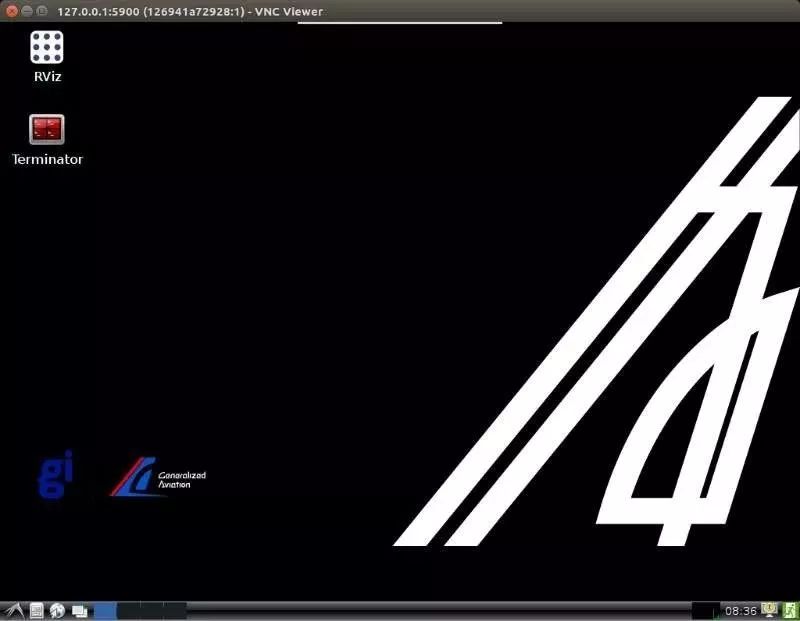
进入 Docker 后的界面截图
执行命令之后,全套仿真环境就安装完毕。非常简单。
然后在 VNC 环境中,运行Gazebo 模拟器。执行 GAAS 的 commander.py 文件,便可以进入 Offboard 操控无人机。用户还可以在模拟器中试试其他提供的 API。如果网速快的话,全部操作只需几十分钟即可完成。
Gazebo 模拟器界面
详细的教程可以在此学习:
https://gaas.gitbook.io/guide/wu-ren-ji-zi-dong-jia-shi-xi-lie-offboard-kong-zhi-yi-ji-gazebo-fang-zhen
5
了解更多
这就是 GAAS,为加速无人机软件开发所设计的开源系统。
GAAS 还有更多功能在不断更新。
完整代码可在此查看:
https://github.com/generalized-intelligence/GAAS
作者丨王汉洋
转自丨地面情报站
往期热文(点击文章标题即可直接阅读):