CVPR2018:基于时空模型无监督迁移学习的行人重识别

本文为你解读CVPR2018 TFusion
解决的目标是跨数据集的Person Reid
属于无监督学习
方法是多模态数据融合 + 迁移学习
实验效果上,超越了所有无监督Person reid方法,逼近有监督方法,在部分数据集上甚至超越有监督方法
一、Task
行人重识别(Person Re-identification)是一个图像检索问题,给定一组图片集(probe),对于probe中的每张图片,从候选图片集(gallery)中找到最可能属于同一个行人的图片。
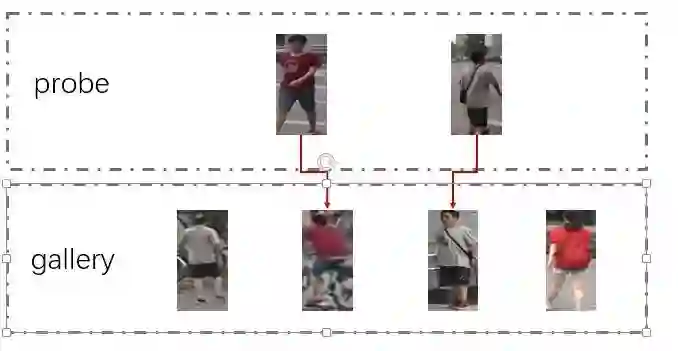
行人重识别数据集是由一系列监控摄像头拍摄得到,并用检测算法将行人抠出,做行人的匹配。在这些数据集中,人脸是十分模糊的,无法作为匹配特征,而且由于多个摄像头拍摄视角不同,同个人可能被拍到正面,侧面,背面,具有不同的视觉特征,因此是一个比较难的图像匹配问题。常用数据集有很多,可以在这个网站查到。
二、Related Work
行人重识别问题有以下几种常见的解决方案:
1、基于视觉的行人重识别
这类方法通常提取行人图像特征,对特征进行距离度量,从而判断是否是同一个人。
2、有监督学习
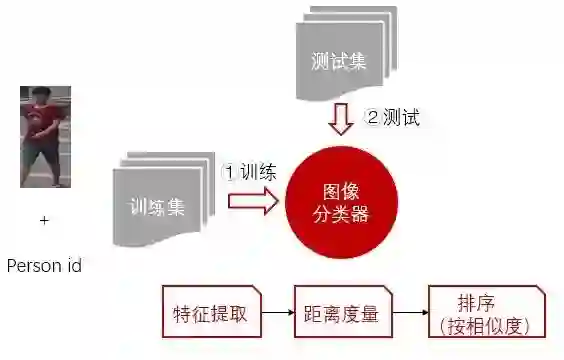
这类方法通常需要提供行人图片和行人id标签(person1,person2等),训练模型,提取图像特征,根据两张图特征的距离大小(可以用余弦距离,欧氏距离之类的计算),为probe中的每张图和gallery中的每张图计算其相似度,根据相似度将gallery中的图片排序,排序越高越可能为同一个人。
这方面的论文代表有TOMM2017: A Discriminatively Learned CNN Embedding for Person Re-identification,我们采用的基础图像分类器就是基于这篇论文用Keras实现的,后面细讲。
3、无监督学习
在CVPR2018之前,Person Reid领域正式发表的无监督工作只有CVPR2016的UMDL:Unsupervised Cross-Dataset Transfer Learning for Person Re-identification,基于字典学习方法,在多个源数据集上学习跨数据集不变性字典,迁移到目标数据集上。然而准确率依然很低。
4、结合摄像头拓扑的行人重识别
行人图片是摄像头拍到的,摄像头之间有一定的距离,行人的移动有一定的速度限制,因此行人在摄像头间的移动时间就会呈现出一定规律,比如,AB摄像头间有10米,人行走速度2m/s,如果AB摄像头在1s内捕捉到了两张图片,则这两张图片不可能是同一个人的,因此我们可以利用摄像头拓扑约束来提升行人重识别的准确率。
然而,这类方法往往有以下缺陷:
有些方法需要预先知道摄像头拓扑(AB摄像头之间的距离)
有些方法可以根据拍摄到的图像数据推断出摄像头拓扑,但是需要图像有标注(是否是同一个人)
即使推断出摄像头拓扑,与图像的融合结果依然很差
5、迁移学习
迁移学习现在是深度学习领域很常用的一个套路了,在源数据集上预训练,在目标数据集上微调,从而使得源数据集上的模型能够适应目标场景。这方面的论文代表有前面讲的UMDL,和Deep transfer learning person re-identification,然而,目前的迁移学习大多需要标签,而无监督迁移学习效果又很差,仍然有很大提升空间。
更多关于Person Reid的内容可以看一下我在博客写的几篇调研
三、Motivation
现有的行人重识别数据集中是否包含时空信息?包含的话是否存在时空规律?
缺乏两个时空点是否属于同一行人这种标签时,如何挖掘时空信息,构建时空模型?
如何融合两个弱分类器?有监督的融合有boosting算法可以用,无监督呢?
在缺乏标签的条件下,如何进行有效的迁移学习?
对应有三个创新点
无监督的时空模型构建
基于贝叶斯推断的时空图像模型融合
基于Learning to Rank的迁移学习
接下来详细解析我们的方法。
四、时空模型
数据集中的时空规律
所谓时空模型,即一个摄像头网络中,行人在给定两个摄像头间迁移时间的分布。
我们看遍所有Reid数据集,发现有三个数据集有时空信息,Market1501, GRID, DukeMTMC4ReID,其中,DukeMTMC-ReID是2017年后半年才出来的,时间比较仓促在论文中就没有包含跟它相关的实验。Market1501是一个比较大的Person Reid数据集,GRID是一个比较小的Person Reid数据集,并且都有六个摄像头(GRID中虽然介绍了8个摄像头,实际上只有6个摄像头的数据)。
例如,Marke1501中一张图片的时空信息是写在图片名字中的:

0007代表person id,
c3代表是在3号摄像头拍到的,也就是空间信息,
s3代表属于第3个时间序列(GRID和DukeMTMC中没有这个序列的信息,在Market1501中,不同序列的属于不同起始时间的视频,同一系列不同摄像头的视频起始时间相近),
077419为帧号,也就是时间信息。
我想吐槽的是,其实时空信息是非常容易保存的,只要知道图片是在什么时候,哪台摄像机上拍摄,就能够将时空信息记录并有效利用起来,希望多模态数据融合得到更多重视之后,做数据集的人能够更加重视可保存的信息吧。
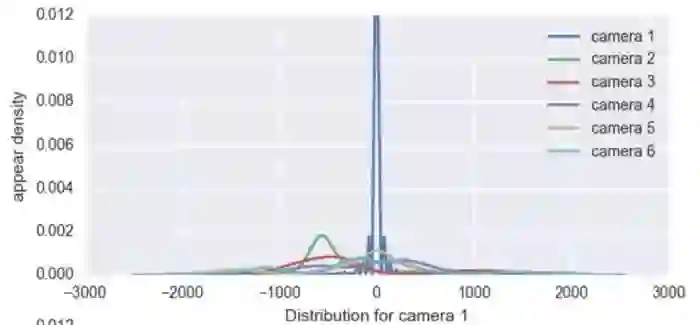
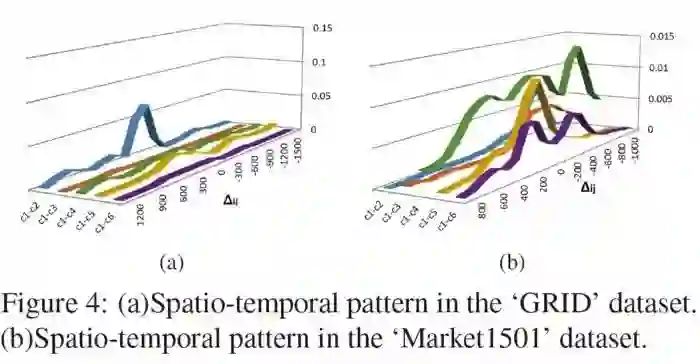
我们首先通过Market1501中的真实行人标签,计算训练集中所有图片对对应的时空点对对应的迁移时间,这里可视化了从摄像头1出发的行人,到达其他摄像头需要的时间的分布。
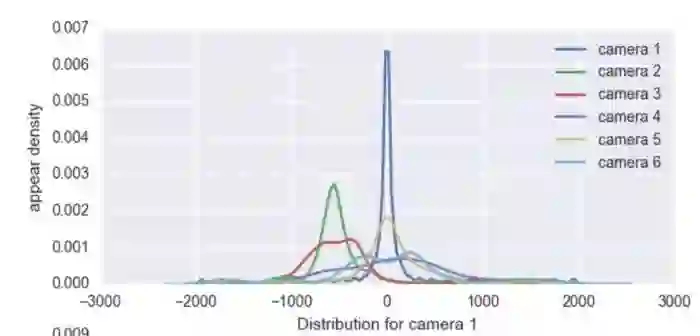
可以看到,到达不同目标摄像头的峰值位置不同,其中从摄像头1到摄像头1,意味着被单个摄像头拍到连续多帧,所以峰值集中在0附近,从摄像头1到摄像头2,峰值集中在-600附近,意味着大部分人是单向从摄像头2运动到摄像头1,等等,并且,说明这个数据集中存在显著可利用的时空规律。
无监督的时空模型构造
我们将迁移时间差命名为delta,这样说起来方便一点。
如果我们能够统计一个数据集中的所有delta,给定一个新的delta(两个新的图片对应的两个时空点算出来的),我们能够用极大似然估计,用在这个delta前后一定范围(比如100帧)的delta的出现频率(=目标范围delta数量/总的delta数量),作为新时间差出现的概率,也就是两个时空点是同一人产生的概率。
但是!问题是我们在目标场景上往往是没有行人标记数据的!
于是我们就思考,
我们能不能根据两个时空点对应的两张图是否属于同一个人,来决定两个时空点是否属于同一个人?
而两张图是否属于同一个人,其实是一个图像匹配的二分类问题,我们可以用一些视觉模型来做,
但是这种视觉模型往往是需要有标签训练的,无标签的视觉模型往往比较弱
视觉模型弱没关系!我们相信跟时空模型结合就能变成一个强大的分类器!要有信仰!
只要我们能无监督地把时空模型构造出来,结合弱的图像分类器,因为加了时空信息,一定能吊打其他无监督模型!
思路有了,实现就很自然了,
我们先在其他数据集上(于是我们就可以说这是一个跨数据集的任务了)预训练一个卷积神经网络,
然后用这个卷积神经网络去目标数据集上提特征,
用余弦距离算特征相似度
将相似度排在前十的当做同一个人
用这种“同一个人”的信息+极大似然估计构造时空模型
图像分类器上,我们这里用的是LiangZheng的Siamese网络,他们的源码是用MATLAB实现的,我用Keras复现了一把:
时空模型的极大似然估计可以看这里
聪明的读者应该会注意到,这个图像分类器是在其他数据及上预训练的,由于特征空间中数据分布不同,这个图像分类器太弱了,对于目标数据集来说,前十里会有许多错的样本,导致构造出来的时空模型和真实的时空模型有偏差
可以看到,构造的模型跟真实的模型还是有些差别的,但是峰值位置还是差不多,一定程度上应该还能用,但我们还是希望构造的模型尽量接近真实模型的。
于是我们开始思考
导致模型出现偏差的因素是什么?是错误的样本对
如何去掉错误样本对的影响?我们能不能把错误的样本对分离出来?没有标签咋办?
(灵光一闪)错误的样本不就跟我瞎选的差不多?那我是不是可以随机地选样本对,算一个随机的delta分布出来
将估算的delta分布去掉随机的delta分布,剩下的多出来的部分,就是由于正确的行人迁移产生的,不就得到真实的delta分布了?
于是我们可视化了一下随机的delta分布
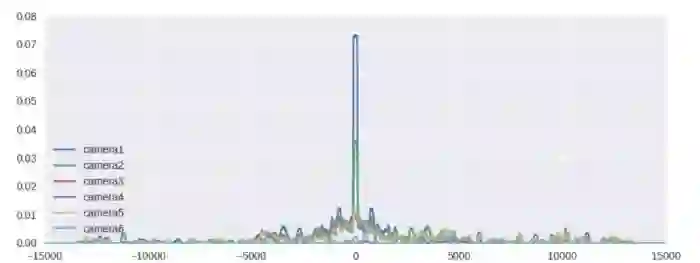
可以发现,
确实与估计模型和真实模型不同
存在较多抖动
这种随机的时间差分布也呈现出一定的集中趋势,其实体现的是采样的时间差分布,如,在1号摄像头采的图片大多在某个时间段,2号摄像头也大多在这个时间段采,但3号摄像头的图片大多是在其他时间段采到的。
考虑到时间差的频率图有这么多的抖动,我们在计算某个区域的时间差时,加上了均值滤波,并且做了一定区域的截断,包括概率极小值重置为一个最小概率值,时间差极大值重置为一个最大时间差。
接下来,应该怎么把错误的模型从估计的模型滤掉呢?又怎么将时空模型和图像模型结合呢?
首先看时空模型和图像模型的融合, 我们有一个视觉相似度



这样一看,像不像条件概率公式?于是我们开始推导(大量公式预警):
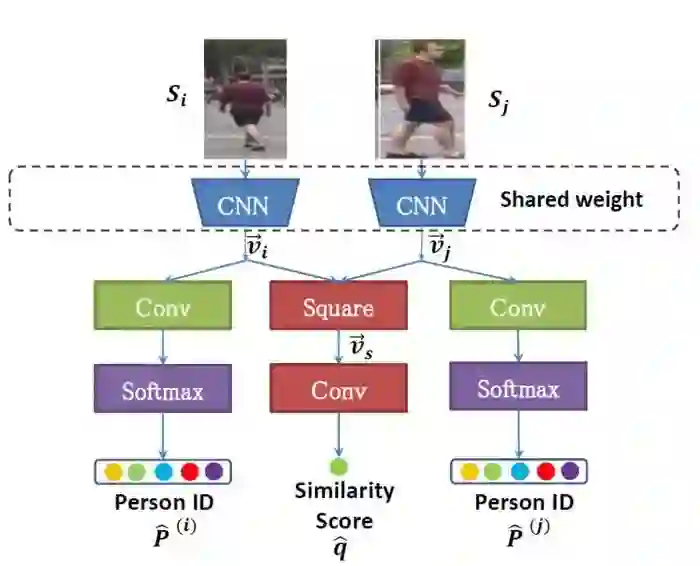
先看看我们手上的资源:现在我们有一个弱的图像分类器,可以为两张图片提取两个视觉特征vi, vj, 有两个时空点,空间特征为两个摄像头编号ci, cj,时间特征为两张图片拍摄的时间差∆ij,假定两张图对应的person id分别为Pi, Pj,那么我们的目标就是求,在给定这些特征的条件下,两张图属于同一个人的概率

由条件概率公式

由时空分布和图像分布的独立性假设(长得像的人运动规律不一定像),我们可以拆解第一项,得到

其中

由条件概率公式

可以看到


再次利用时空分布和图像分布的独立性假设,拆解分母

约掉


也就是
= 视觉相似度*同一人产生这种移动的概率/任意两个时空点组成这种移动的概率
这也就是论文公式(7),也就是我们一开始的猜想:

看着好像很接近我们手头掌握的资源了,但是,
我们并不知道理想的两张图的视觉相似度


我们并不能计算同一人产生这种移动的真实概率


我们倒是确实有数据集中任意两个时空点产生这种移动的概率P(ci,cj,∆ij)
于是我们想用

看到这里其实就大致理解我们的融合原理了,实际上我们大部分实验也是用的这个近似公式算的。
实现上,先模拟两个时空模型,计算图像相似度,然后代入公式求融合评分,具体可以实现看我GitHub
但这个近似能不能做呢?我们来做一下误差分析(大量推导,不感兴趣可以跳到接下来出现的第二张图,不影响后面的理解,只是分析一波会更加严谨)。
实际上,误差是由图像分类器引入的,假设图像分类器判定两张图是同一个人的错判率为Ep,图像分类器判定两张图不是同一人的错判率为En,
则有,
则

推导,Pr(ci,cj,∆ij|Pi=Pj) 和Pr(ci,cj,∆ij|Si=Sj) 的关系(这个没法像视觉相似度那样直接推导,因为因果关系不同)

同样可以得到

联立上面两个式子解方程,消掉

其中有个新概念Pr(ci,cj,∆ij|Si≠Sj) ,意味着图像分类器认为不是同一个人的时候,这种时空点出现的概率,实现上也不难,统计视觉相似度top10以后的点对应的时间差,作为反时空概率模型即可。
我们把两个近似(公式5和公式8)代进公式7,
可以得到

其中,



分母为
以上四项都是可以从无标签目标数据集中结合图像分类器求解到的,并且,当

到这里,你是不是以为我们就可以用公式9算融合评分了?非也,公式9中,还有个问题:
在论文Table1,2,3,4,Fig6相关的实验中,α=β=0,并且,在Fig5中,我们设置了其他常数来检查模型对于这种近似的敏感性
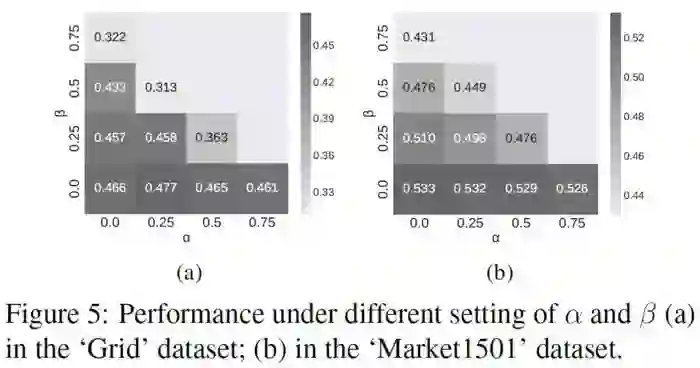
可以看到,虽然α和β较大时,准确率会有所下降,但是仍然能保持一定的水准,当你看到纯图像分类器的准确率之后,还会发现融合模型的准确率一直高于纯图像分类器。
你可能注意到了,图中α+β都是小于1的,这是因为,只有当Ep+En<1且α+β<1时,融合模型的Ep+En才会小于图像模型的Ep+En,说人话就是,只有图像模型不是特别糟糕,且近似的参数也比较正常的时候,融合模型才会比单个的图像模型要准,融合才有意义。这个定理的具体的证明放到论文附录里了,有兴趣的可以邮件私信我拿附录去看,这里摆出来就太多了。
于是我们得到了一个由条件概率推断支撑的多模态数据融合方法,称为贝叶斯融合
看一眼融合得到的时空分布图:
再从数据上看一眼融合的模型有多强:
可以看到,
跨数据集直接迁移效果确实很差
融合之后的准确率Rank1准确率变成2-4倍
说明这种融合方式是确实行之有效的。
基于Learning to Rank的迁移学习
前面讲到图像分类器太弱了,虽然融合后效果挺好的(这个时候我们其实想着要不就这样投个NIPS算了),但是如果能提升图像分类器,融合的效果理论上会更好。而现在我们有了一个强大的融合分类器,我们能不能用这个融合分类器为目标数据集的图片打标签,反过来训练图像分类器呢?
一个常用的无监督学习套路就是,根据融合评分的高低,将图片对分为正样本对和负样本对(打伪标签),然后喂给图像分类器学习。
我们也尝试了这种做法,但是发现,数据集中负样本远远多于正样本,融合分类器分对的负样本是挺多的,但是分对的正样本超级少,分错的正样本很多,错样本太多,训练出来效果极差,用上一些hard ming的技巧也不行。
于是我们思考,
我们无法提供正确的01标签,分类器就只能学到许多错的01标签
我们是否可以提供一些软标签,让分类器去学习回归两个样本之间的评分,而不是直接学习二分类的标签?
这是一个图像检索问题,我们能不能用信息检索中的一些学习方法来完成这个任务?
于是自然而然地想到了Learning to Rank
Ranking
问题定义:给定一个对象,寻找与其最相关的结果,按相关程度排序
常用方法:
Point-wise:每一个结果算一个绝对得分,然后按得分排序
Pair-wise:每两个结果算一下谁的得分高,然后按这个相对得分排序
List-wise:枚举所有排列情况,计算综合得分最高的一种作为排序结果
综合得分往往需要许多复杂的条件来计算,不一定适用于我们的场景,所以排除List-wise,Point-wise和Pair-wise都可以采用,得分可以直接用融合评分表示,Pair-wise可以用一组正序样本,一组逆序样本,计算两个得分,算相对得分来学习,有点Triplet loss的意味,于是在实验中采用了Pair-wise方法。
Pair-wise Ranking
给定样本
,其排序得分为
给定样本
,其排序得分为
定义
,如果
0"> 说明
的排名高于
将这个排名概率化,定义
,为xi排名高于xj的概率。
对于任何一个长度为n的排列,只要知道n-1个相邻item的概率
,就可以推断出来任何两个item的排序概率
例如,已知


 ,
,



RankNet: Pair-wise Learning to Rank
RankNet是Pair-wise Learning to Rank的一种方法,用一个神经网络去学习输入的两个样本(还有一个query样本)与其排序概率(上面定义的)的映射关系。
具体到我们这个问题里
给定查询图片A,给定待匹配图片B和C
用神经网络预测AB之间的相似度Sab为B的绝对排序得分,计算AC之间的相似度Sac为C的绝对排序得分
具体的神经网络用Keras实现并可视化出来长这样:
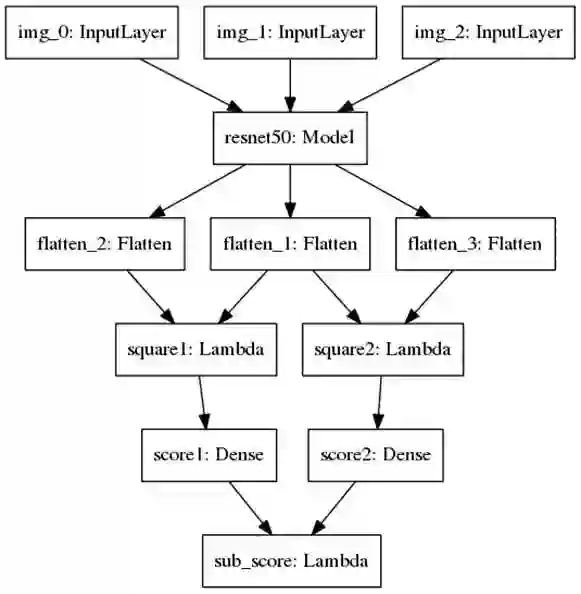
输入是三张图片,分别用Resnet52提取特征并flatten
flatten之后写一个Lambda层+全连接层算特征向量带权重的几何距离,得到score1和score2
用score1和score2和真实分数算交叉熵Loss(下面讲)
则B排序高于C的概率为:

用预测概率Pbc去拟合真实的排序概率,回归损失用预测概率和真实概率的交叉熵表达

网络实现超级简单,主要麻烦在样本三元组构造
Transfer Learning to rank
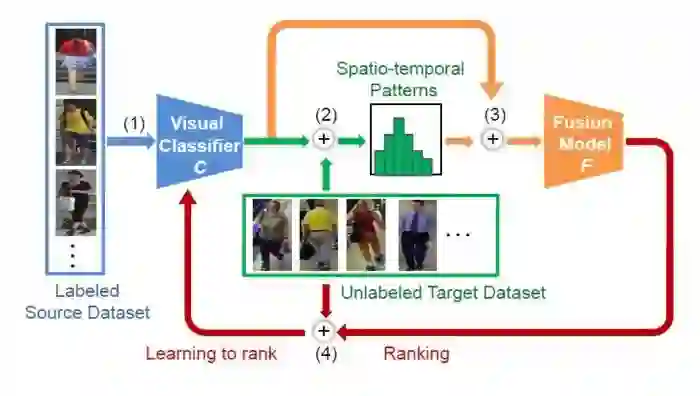
整个Learning to rank过程如图
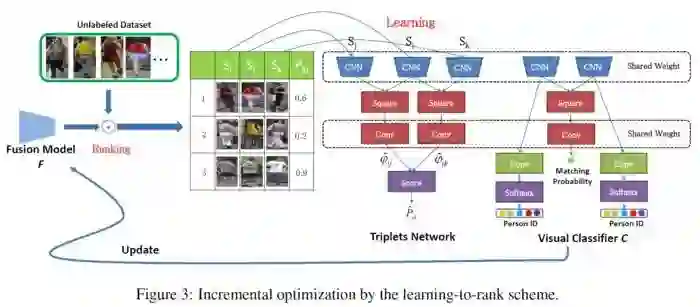
我们用融合分类器为目标数据集中的图片对评分,构造三元组输入RankNet,其中Si是查询图,Sj是在与Si融合相似度top1 - top25中抽取的图片,Sk是在与Si融合相似度top25 - top50中抽取的图片,喂给RankNet学习,使得resnet52部分卷积层能充分学习到目标场景上的视觉特征。
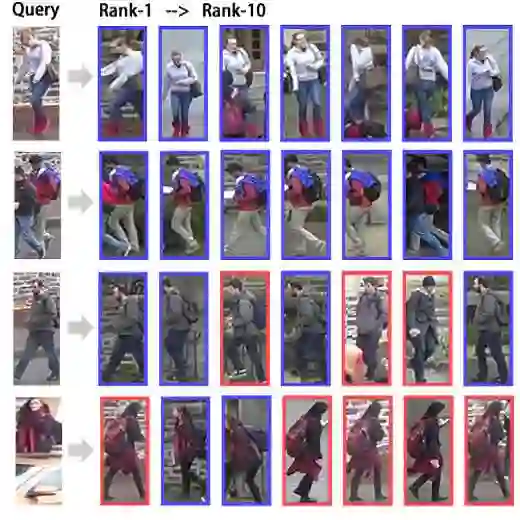
Learning to Rank效果
对比Learning to Rank前的效果,准确率都提升了,GRID数据集上提升尤为明显。
对比SOA有监督方法
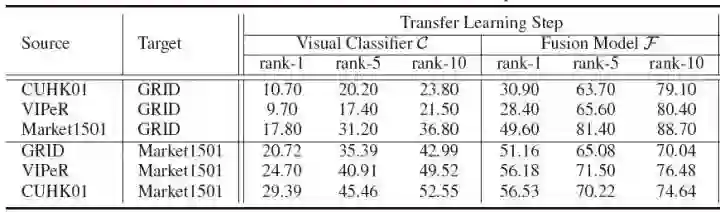
一方面,我们将上面的跨数据集无监督算法应用在GRID和Market1501两个数据集上,与当前最好的方法进行对比,另一方面,我们还测试了有监督版本的效果,有监督即源数据集与目标数据集一致,如GRID预训练->GRID融合时空,效果如下:
GRID
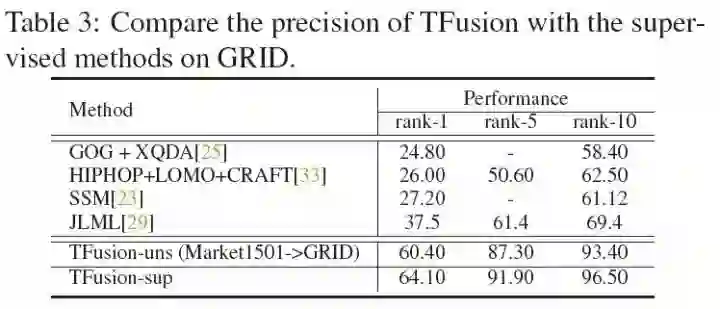
由于在这个数据集上时空规律十分明显(正确时间差都集中在一个很小的范围内),可以过滤掉大量错误分类结果,所以准确率甚至碾压了全部有监督方法。
Market1501
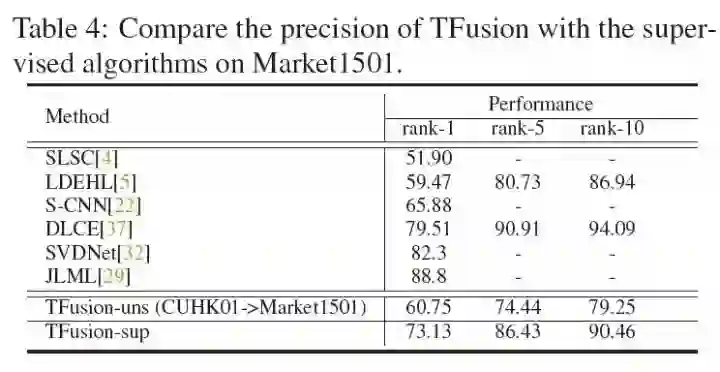
在Market1501这个数据集上,无监督的方法逼近2016年的有监督方法(我们的图像分类器只是一个ResNet52),有监督的方法超越2016年的有监督方法,虽然比不上2017年的有监督方法,但是如果结合其他更好的图像分类器,应该能有更好的效果。
对比SOA无监督方法
我们向UMDL的作者要到了代码,并复现了如下几组跨数据集迁移实验
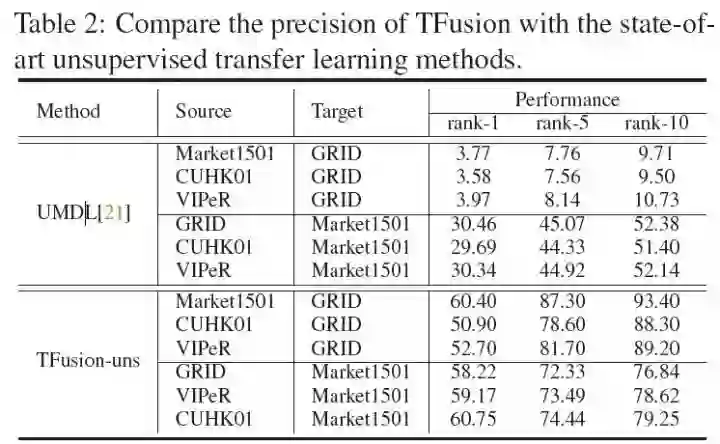
其中,UMDL迁移到Market1501的结果与悉尼科技大学hehefan与LiangZheng复现出来的效果差不多,所以我们的复现是靠谱的。
可以看到,无监督的TFusion全面碾压UMDL。
更多详细实验结果可以到论文中细看。
多次迭代迁移学习
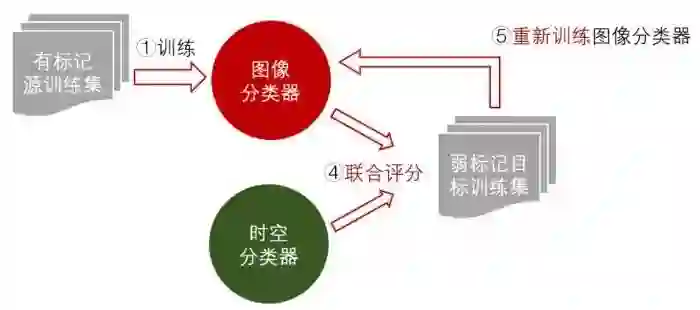
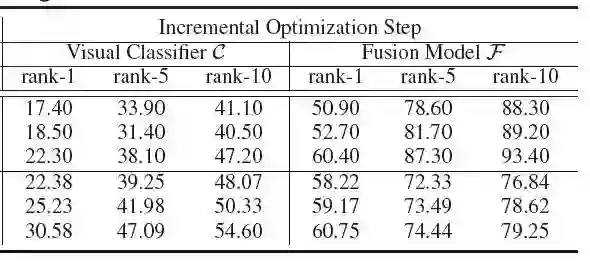
回顾一下整个架构,我们用图像分类器估算时空模型,得到融合模型,用融合模型反过来提升图像分类器模型,图像分类器又能继续增强融合模型,形成一个闭环,理论上这个闭环循环多次,能让图像分类器无限逼近融合分类器,从而得到一个目标场景中也很强大的图像分类器,因此我们做了多次迭代的尝试:
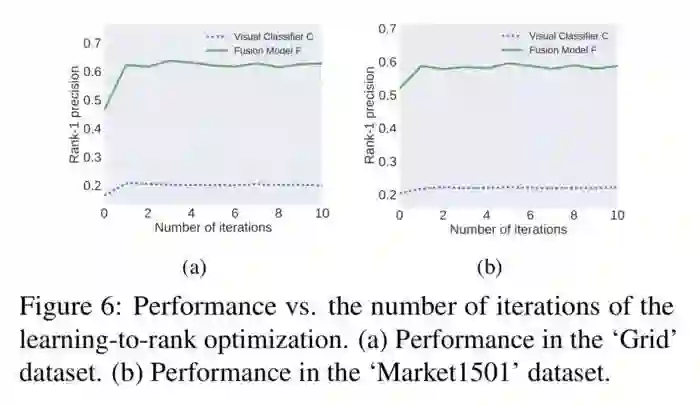
在从目前的实验效果看,第一次迁移学习提升比较大,后面提升就比较小了,这个现象往好了说可以是收敛快,但往坏了说,虽然图像分类器得到了提升,但是没有出现图像分类器提升大于融合分类器的现象,所以这里边应该还有东西可挖。
论文:https://arxiv.org/abs/1803.07293
代码:https://github.com/ahangchen/TFusion
来源:https://zhuanlan.zhihu.com/p/34778414?utm_medium=social&utm_source=wechat_session&wechatShare=2&from=groupmessage&isappinstalled=0
- 马上学习AI挑战百万年薪 -
点击“ 阅读原文 ”,查看详情