初探Video Transformer(二):谷歌开源更全面、高效的无卷积视频分类模型ViViT

极市导读
Video Transformer系列的讲解第二篇:相比于TimeSformer,ViViT不单单给出结构范式,同时也给出了迁移imagenet pretrain的实验分析,并给出了训练小数据集上的策略。实验表明,相比于TimeSformer,ViViT更SOTA。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
paper: https://arxiv.org/abs/2103.15691
code(Unoffical):
model2:https://github.com/rishikksh20/ViViT-pytorch
model4: https://github.com/noureldien/vivit_pytorch
code(Offical): https://github.com/google-research/scenic/tree/main/scenic/projects/vivit
一、前言
Google的这篇paper和FBAI的很类似,都是给出几个VideoTransformer的范式,解决怎么把Transformer结构从Image迁移到Video上。相比于TimeSformer,google的这篇paper不单单给出结构范式,同时也给出了迁移imagenet pretrain的实验分析,并给出了怎么训练小数据集上的策略。实验表明,相比于TimeSformer,ViViT更SOTA。(ps:这两篇paper第一版本相差了1个半月的时间,很有可能是同期工作,也有可能Google填了一点FB的坑)
二、出发点
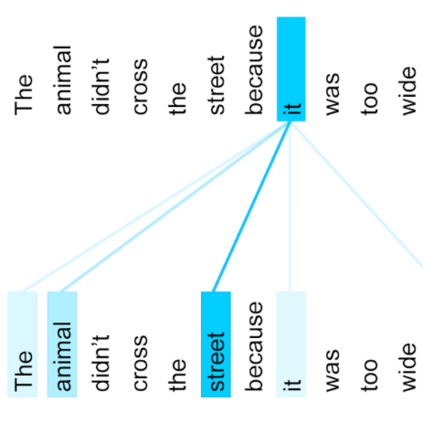
基本上使用Transformer作为结构都有一个共性,那就是self-attention的特性:
-
长距离依赖性(long-range dependencies) -
序列中的每个元素都会与整体进行计算
相比于CNN结构,Transformer具备更少的归纳偏置,所以需要更多的数据或者更强的正则来训练。
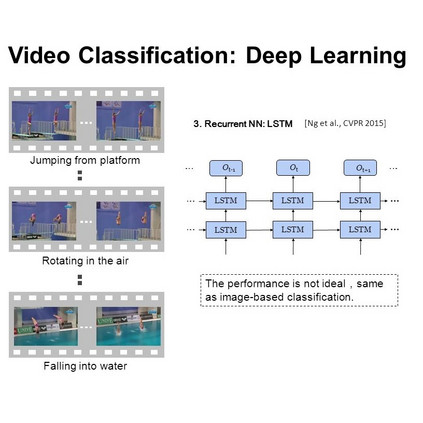
对于Video数据,要满足时序和空间特征的计算,所以要改进Transformer结构。
三、算法设计
为了让模型表现力更强,ViViT讨论了两方面的设计和思考(TimeSformer只考虑了模型结构设计):
-
Embedding video clips -
Transformer Models for Video
Overview of Vision Transformers (ViT)
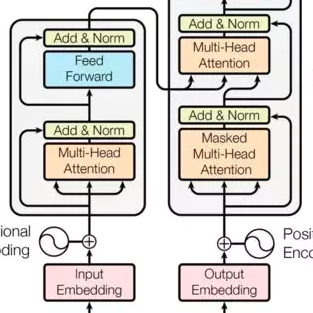
先看一下ViT(Image)的公式定义:输入为 , 经过线性映射后,变换为一维tokens, 。输入的编码表达如下:
这里的 是2d卷积。如下图最左边结构所示,添加一个可学习的token, ,用于表达最后分类之前的特征。这里, 表示为位置编码,加上输入token,用来保留位置信息。接下来,tokens经过 层的Transformer编码层。每层 都包含Mutil-Headed Self-Attention(MSA)和LayerNorm(LN) 以及一个MLP结构,表示如下:
MLP由两个线性层以及GELU构成,整个推理过程中,token的维度 保持不变。最后,用一个线性层来对encoded的 完成最终的分类,当然也可以用除了cls-token以外的所有tokens的的全局池化来进行分类。
Embedding video clips
文中考虑了两种简单的方法来构建从视频
到token序列
的映射。还记得在TimeSformer里的token序列吗,实际上是先把
与batchsize进行合并,然后用2d卷积进行TokenEmbeeding,然后通过交换
维度以及额外的TimeEmbeeding来实现空间和时序的信息特征交互。这里稍微不同在于,本文的一种新的采样方法是直接在Embeeding阶段就把时序的token引入进来了,看下面提出的两种方法。
-
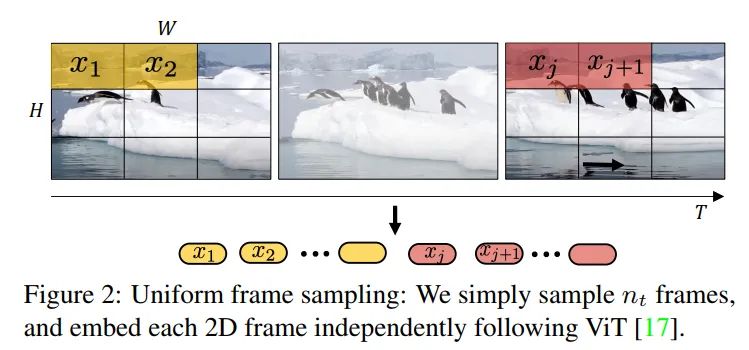
Uniform frame sampling
如图2所示,最直接的方法就是均匀采样 帧,每帧独立计算
token-embeeding,并把这些token直接concat起来,公式可以表达为:ViT的token获取是没有重叠的,所以可以直接想象成,我们先把 帧的图像拼接起来成一个大的图像,然后用2d卷积得到token,等价于上述表达。所以可获取token序列为 。
图3. 管道编码 -
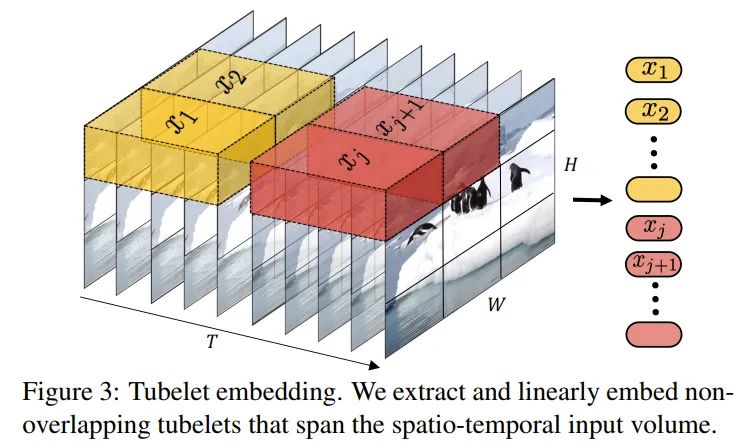
Tubelet embedding
图3给出了两一种编码方法,同时获取时序和空间的token,实际可以用3D卷积来实现。对于维度为 的tubelet来说,有。相比于第一种方法需要在encoder阶段融合时序和空间信息,这个方法在生成token阶段就进行了融合,直观上看,没有"割裂"感。
Transformer Models for Video
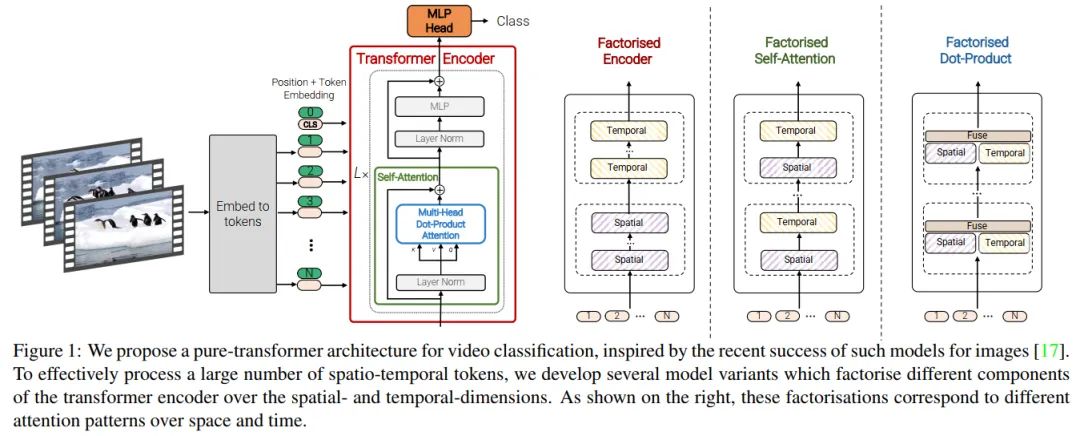
文中给出了三种模型变体的范式,如图1右边所示,下面给出详细介绍
Model 1: Spatio-temporal attention
这个其实没有更改模型结构,和第一篇讲的TimeSformer的Joint Space-Time基本一致,合并token
直接送入ViT,由于self-attention性质,从第一层开始,时序和空间信息就进行了交互直到最后的分类。这个方法比较暴力也很简单,但是对于self-attention的计算量会从
增加到
,采样帧越多,计算量越大。所以简单的方案不是最优的方案,还需要考虑其他的结构改进。
Model 2: Factorised encoder
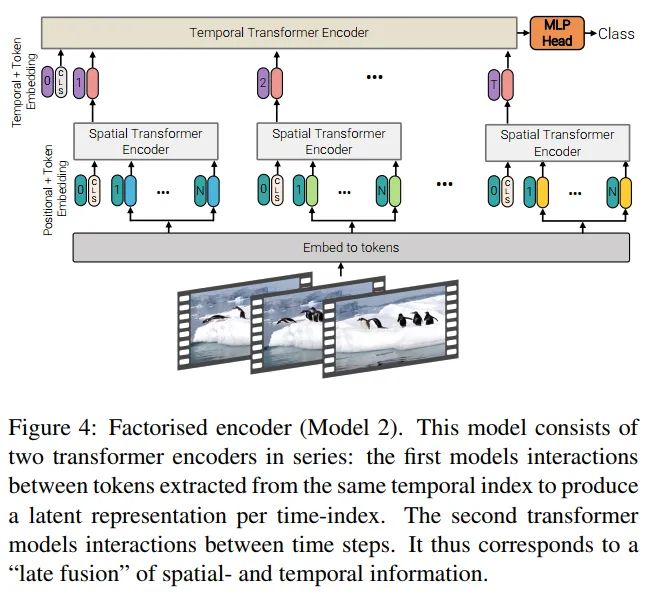
如上图4所示,这个模型结构包含了两个分离的transformer编码结构。首先是spatial encoder,只计算同一帧下面的spatial-token,经过 层后,可以得到每帧的表达, 。由于spatial-token是有cls-token的,所以这里空间特征表达用 来表示。把每帧的特征concat起来, ,输入到 层的Transformer encoder,用于建模不同时序之间的特征交互。最后的cls-token用于分类,完成整个模型设计。计算的复杂度从 降低到
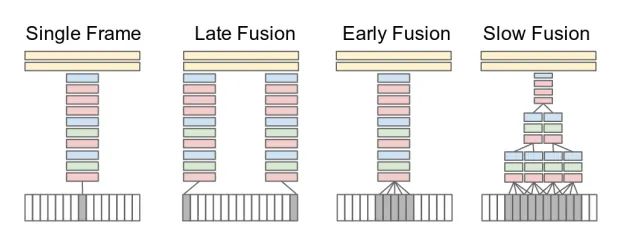
这个模型的设计思路与cnn的"late-fusion"很相似,前面用于独立提取特征,后面用于信息交互打分,如上图所示,这个思想也是很多CNN-base的video方法,例如TSN等。
Model 3: Factorised self-attention
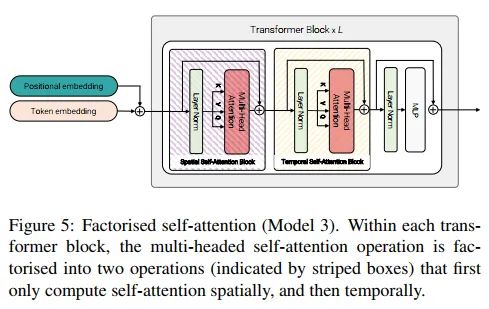
如图6所示,这个结构和TimeSformer设计的Divided Space-Time基本一样的,在一个transformer blocl里面,先进行spatial-attention再做temporal-attention,相比于Model1有效性更高,同时和Model2一样的计算复杂度。可以通过重排token的shape来实现计算空间attention,
到
。计算时序attention的时候,再进行重排,
,这里的batchsize默认为1。公式可以表达为:
这里有个很有意思的点,TimeSformer的结论是T-S的顺序会有提升,S-T的顺序会有下降,但是ViViT的结论是T-S和S-T指标没区别。TimeSformer在实现的时候考虑了cls-token的信息变化,ViViT直接弃用了,以免信息混淆。
Model 4: Factorised dot-product attention
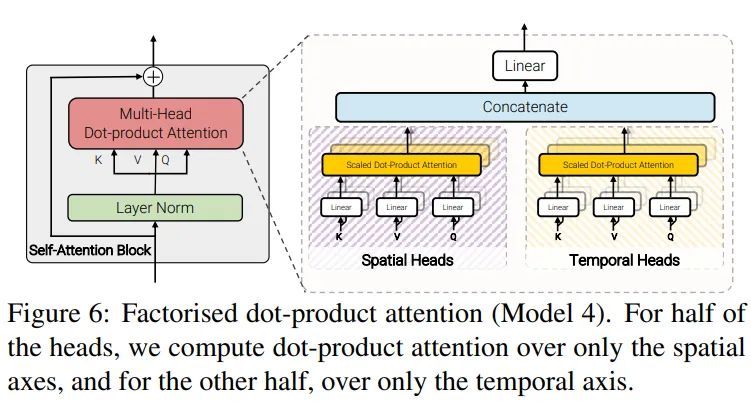
如图所示,模型采用分离的MSA,使用不同的heads来分别计算spatial和temporal。我们定义attention公式为:
其中, , ,,这里维度表示为 。此结构的核心idea是构建空间 和时序 ,表示各自维度的key和value信息。用一半的heads来计算空间特征,,余下的heads用于计算时序特征最后把时序和空间特征concateate起来,并经过线性映射用于特征交互, 。
Initialisation by leveraging pretrained models
广为人知的是,Transformer只有在大规模的数据集上表现很好,因为相比于CNN,有更少的归纳偏置。虽然目前很多视频数据集量足够大,但是标注级别相比于图像来说还是略少,所以想要从零开始训练一个高精度的大模型还是具有挑战性的。为了规避问题,需要使用image的pretrain来做video的初始化,但是video模型和image模型还是存在部分差异的,不能完全迁移权重,本文提出了几个有效的策略来解决这个问题。
-
Positional embeddings由于图像模型的 positonal-embeeding维度为 , 视频具有一个时序的维度 ,所以为了维度匹配,直接按t维度进行repeat为 。这样初始化阶段,每帧都具备相同的编码信息。 -
Embedding weights, E对于 tubelet embedding来说,用的是3d卷积,图像经常使用的是2d卷积,那么就需要考虑如何把2d迁移到3d上去。第一种方法是"inflate",简单来说,按t维度上进行复制,然后再求个平均,表达式如下:
另一种方法是"central frame initialisation", 除了中间帧初始化以外,其他的帧都设置为0,表达如下:
-
Transformer weights for Model 3模型3的结构设计,是独立的空间attention和时序attention,空间attention可以直接使用图像模型的pretrain,时序attention初始化为0。
四、代码分析
Model-1
model1就是标准的VIT结构,除了patchembeeding以外没有任何的改变,直接看vit代码就可以了。
Model-2
有spatial-attention和temporal-attention,所以需要注意cls-token的初始化和变化情况,代码如下:
self.to_patch_embedding = nn.Sequential(
Rearrange('b t c (h p1) (w p2) -> b t (h w) (p1 p2 c)', p1 = patch_size, p2 = patch_size),
nn.Linear(patch_dim, dim),
)# 这部分可以用conv2d直接替换掉
self.pos_embedding = nn.Parameter(torch.randn(1, num_frames, num_patches + 1, dim))
self.space_token = nn.Parameter(torch.randn(1, 1, dim))
self.space_transformer = Transformer(dim, depth, heads, dim_head, dim*scale_dim, dropout)
self.temporal_token = nn.Parameter(torch.randn(1, 1, dim))
self.temporal_transformer = Transformer(dim, depth, heads, dim_head, dim*scale_dim, dropout)
上述代码两个token,space_token用来表示spatial的clstoken,temporal_token用来表示temporal的clstoken。其实,cls-token的目的是最终的分类,model2的模型最后的token输出是来自于temporal-transformer的,所以space的cls-token其实是不需要的,直接用avgpool来获取spatial-transformer的结果就可以了,下面看一下forward部分。
x = self.to_patch_embedding(x)
b, t, n, _ = x.shape
cls_space_tokens = repeat(self.space_token, '() n d -> b t n d', b = b, t=t)
x = torch.cat((cls_space_tokens, x), dim=2)
x += self.pos_embedding[:, :, :(n + 1)]
x = self.dropout(x)
x = rearrange(x, 'b t n d -> (b t) n d')
x = self.space_transformer(x)
x = rearrange(x[:, 0], '(b t) ... -> b t ...', b=b)
cls_temporal_tokens = repeat(self.temporal_token, '() n d -> b n d', b=b)
x = torch.cat((cls_temporal_tokens, x), dim=1)
x = self.temporal_transformer(x)
x = x.mean(dim = 1) if self.pool == 'mean' else x[:, 0]
这里用了einops库来实现,简单易懂,做了三个操作,第一个就是获取patch_embeeding, 先进行spatial-attention的计算,把space_token按的维度patch_embeeding进行扩展后concat,reshape为((bt),(n+1),d)后送入space_transformer。输出和输入维度一致,需要计算temporal的attention,重排并concat上cls-token,shape为((b,n),(t+1),d),送入temporal-attention后,用cls-token进行分类计算,over。
Model-3
model3的实现和TimeSformer的实现是一样的,去掉cls-token即可,可以参考TimeSformer的文章。
Model-4
model4的实现与model1不同之处在于,transformer是有两个不同维度的attention来进行计算的,代码如下:
class Attention(nn.Module):
def __init__(self, dim, heads=8, dim_head=64, dropout=0.0, num_patches_space=None, num_patches_time=None, attn_type=None):
super().__init__()
assert attn_type in ['space', 'time'], 'Attention type should be one of the following: space, time.'
self.attn_type = attn_type
self.num_patches_space = num_patches_space
self.num_patches_time = num_patches_time
inner_dim = dim_head * heads
self.scale = dim_head ** -0.5
self.heads = heads
self.attend = nn.Softmax(dim=-1)
self.to_qkv = nn.Linear(dim, inner_dim * 3, bias=False)
def forward(self, x):
t = self.num_patches_time
n = self.num_patches_space
# reshape to reveal dimensions of space and time
x = rearrange(x, 'b (t n) d -> b t n d', t=t, n=n) # (b, t, n, d)
if self.attn_type == 'space':
out = self.forward_space(x) # (b, tn, d)
elif self.attn_type == 'time':
out = self.forward_time(x) # (b, tn, d)
else:
raise Exception('Unknown attention type: %s' % (self.attn_type))
return out
def forward_space(self, x):
"""
x: (b, t, n, d)
"""
t = self.num_patches_time
n = self.num_patches_space
# hide time dimension into batch dimension
x = rearrange(x, 'b t n d -> (b t) n d') # (bt, n, d)
# apply self-attention
out = self.forward_attention(x) # (bt, n, d)
# recover time dimension and merge it into space
out = rearrange(out, '(b t) n d -> b (t n) d', t=t, n=n) # (b, tn, d)
return out
def forward_time(self, x):
"""
x: (b, t, n, d)
"""
t = self.num_patches_time
n = self.num_patches_space
# hide time dimension into batch dimension
x = x.permute(0, 2, 1, 3) # (b, n, t, d)
x = rearrange(x, 'b n t d -> (b n) t d') # (bn, t, d)
# apply self-attention
out = self.forward_attention(x) # (bn, t, d)
# recover time dimension and merge it into space
out = rearrange(out, '(b n) t d -> b (t n) d', t=t, n=n) # (b, tn, d)
return out
def forward_attention(self, x):
h = self.heads
qkv = self.to_qkv(x).chunk(3, dim=-1)
q, k, v = map(lambda t: rearrange(t, 'b n (h d) -> b h n d', h=h), qkv)
dots = einsum('b h i d, b h j d -> b h i j', q, k) * self.scale
attn = self.attend(dots)
out = einsum('b h i j, b h j d -> b h i d', attn, v)
out = rearrange(out, 'b h n d -> b n (h d)')
return out
forward_attention和forward_time分别用于计算((b, t), n, d)和((b, n), t, d)维度的token的attention。
class Transformer(nn.Module):
def __init__(self, dim, heads, dim_head, mlp_dim, dropout, num_patches_space, num_patches_time):
super().__init__()
self.num_patches_space = num_patches_space
self.num_patches_time = num_patches_time
heads_half = int(heads / 2.0)
assert dim % 2 == 0
self.attention_space = PreNorm(dim, Attention(dim, heads=heads_half, dim_head=dim_head, dropout=dropout, num_patches_space=num_patches_space, num_patches_time=num_patches_time, attn_type='space'))
self.attention_time = PreNorm(dim, Attention(dim, heads=heads_half, dim_head=dim_head, dropout=dropout, num_patches_space=num_patches_space, num_patches_time=num_patches_time, attn_type='time'))
inner_dim = dim_head * heads_half * 2
self.linear = nn.Sequential(nn.Linear(inner_dim, dim), nn.Dropout(dropout))
self.mlp = PreNorm(dim, FeedForward(dim, mlp_dim, dim, dropout=dropout))
def forward(self, x):
# self-attention
xs = self.attention_space(x)
xt = self.attention_time(x)
out_att = torch.cat([xs, xt], dim=2)
# linear after self-attention
out_att = self.linear(out_att)
# residual connection for self-attention
out_att += x
# mlp after attention
out_mlp = self.mlp(out_att)
# residual for mlp
out_mlp += out_att
return out_mlp
得到的不同维度的attention进行concat,做一个线性映射后接MLP,其余和model1保持一致。这份代码实现里面没有用到cls-token,直接求了mean。
五、实验结果
Input encoding
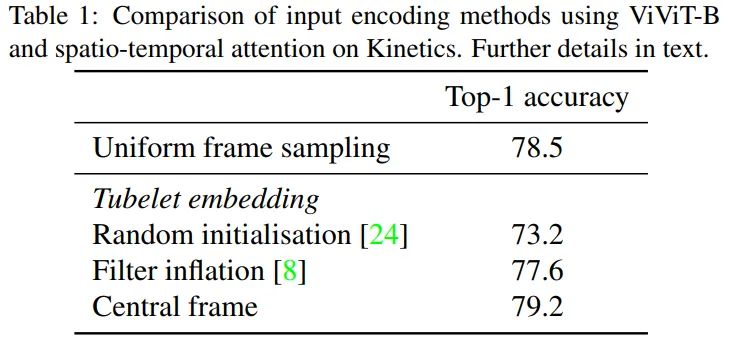
为了比较embeeding方法,这里模型采用的是model1的结构,输入为32帧的video, 采样8帧,使用tubelet embeeding的话,设置 , 这样token的数量可以保持一致。实验结果表明,使用tubelet embeeding并且使用central frame的初始化的方法可以达到最好的精度,后续所有实验均采用此方法。
Model variants
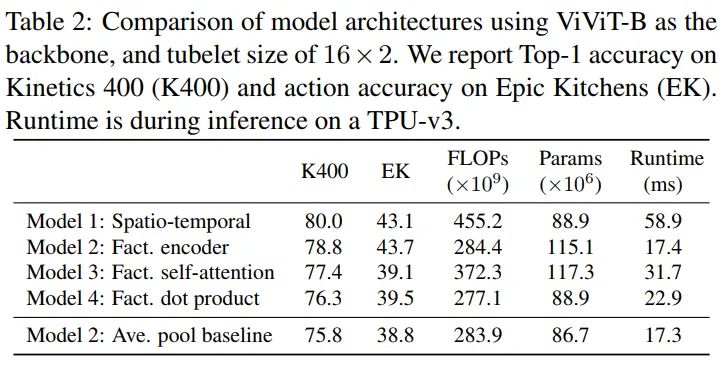
比较模型性能,这里Model2的temporal-transformer设置4层。model1的性能最好,但是FLOPs最大,运行时间最长。Model4没有额外的参数量,计算量比model1少很多,但是性能不高。Model3相比与其他的变体,需要更高的计算量和参数量。Model2表现最佳,精度尚可,计算量和运行时比较低。最后一行是单独做的实验,去掉了Model2的temporal transformer,直接在帧上做了pooling,EK上的精度下降很多,对于时序强的数据集需要用temporal transformer来做时序信息交互。
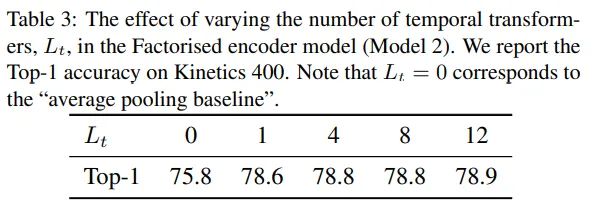
可以看到Model2取temporal-transorformer层数为4的时候可以达到最优效果和最佳参数量。
Model regularisation
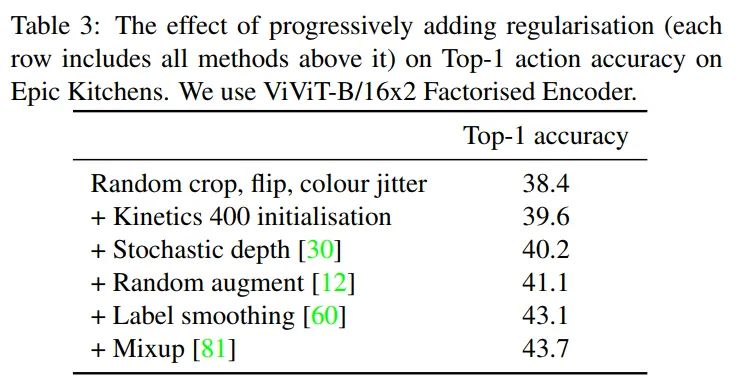
做了一些正则化实验,可以看到使用部分CNN的正则化训练手段也可以有效的提升ViViT在小规模数据集上的性能。在ssv2数据集上也同样提升了近5%的性能。对于Kinetics和Moments in Time数据集,除了第一行以外的正则都没有使用就已经SOTA了。
Varying the backbone
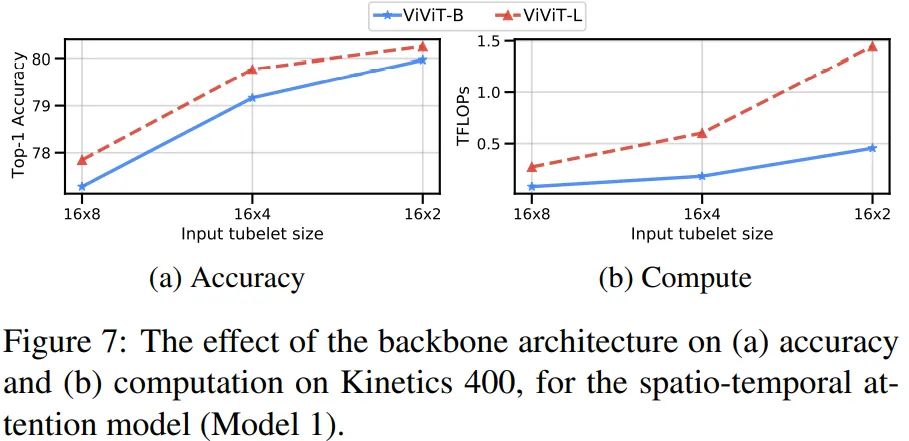
使用更大的模型会有更高的精度,不过计算量的增长速度远超精度,收益不高。
Varying the number of tokens
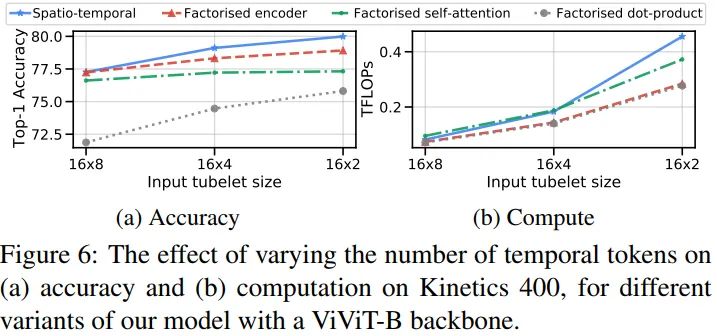
使用更小的tubelet size可以提升所有模型的精度,当然计算量也是跟着增长,Model1的影响最大。
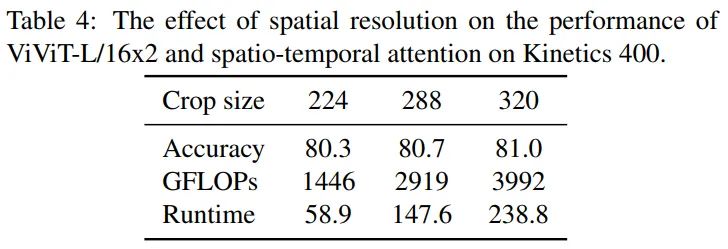
图像尺寸从224提升到了320,精度和计算量也都随着增长,不过仅使用224的尺寸就可以SOTA了。
Varying the number of input frames
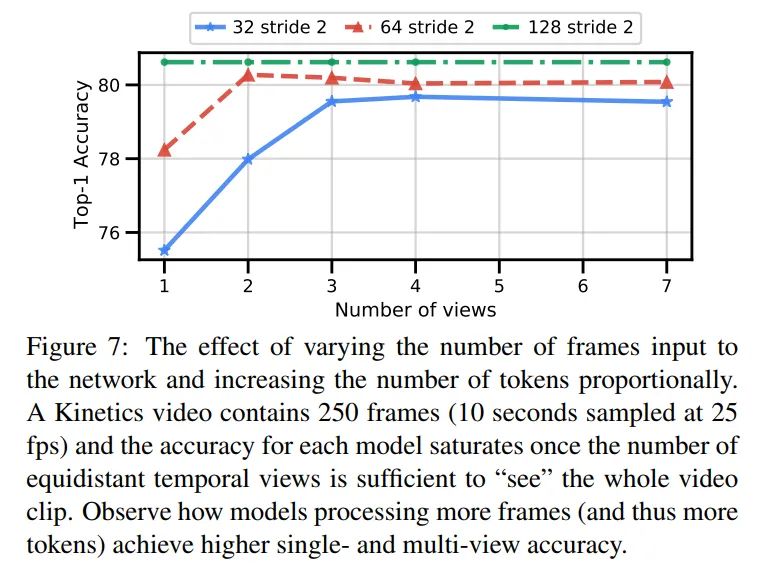
对于K400这种短视频来说,总计250帧,使用stride2采样128帧足够遍历一整个视频了,不管用多少个view的片段都不会影响精度。其他的clips只要views满足遍历一整个视频的时候,精度都不会在提升。
Comparison to state-of-the-art
-
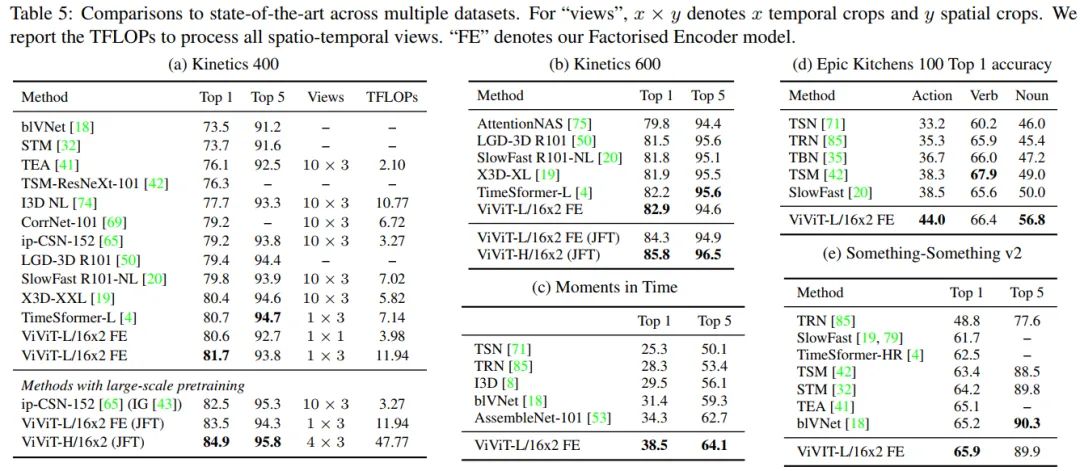
KineticsK400上,使用JFT做pretrain相比于imagenet21k高了3.2%,取得了84.9%的高精度,pretrain对于模型的影响还是至关重要的。当然只使用imagenet21k的ViViT-L就已经超过了TimeSformer-L的效果了。推理使用的是1个clips,3个crop(left,center,right)。K600上,ViViT同样SOTA, JFT pretrian高出了imagenet21k pretrian 2.9%,取得了85.8%的高精度。 -
Moments in Time由于数据集庞杂,标注不精细,整体准确率都偏低,ViViT取得了38.5%的SOTA。 -
Epic Kitchens 100除了"verb"以外均取得了大幅度的领先SOTA,"verb"其他模型更高的结果是因为引入了光流(PS:我查了一下TSM的dataset貌似没有EK的对比结果)。 -
Something-Something v2 (SSv2)ssv2上的结果虽然SOTA,但是没有很大幅度的领先,不过超过了TimeSformer3个点多,说明了ViViT模型结构设计的更合理。ssv2的不同类别的背景和物体非常相似,这意味着识别细粒度的运动模式对于区分不同类别是必要的。
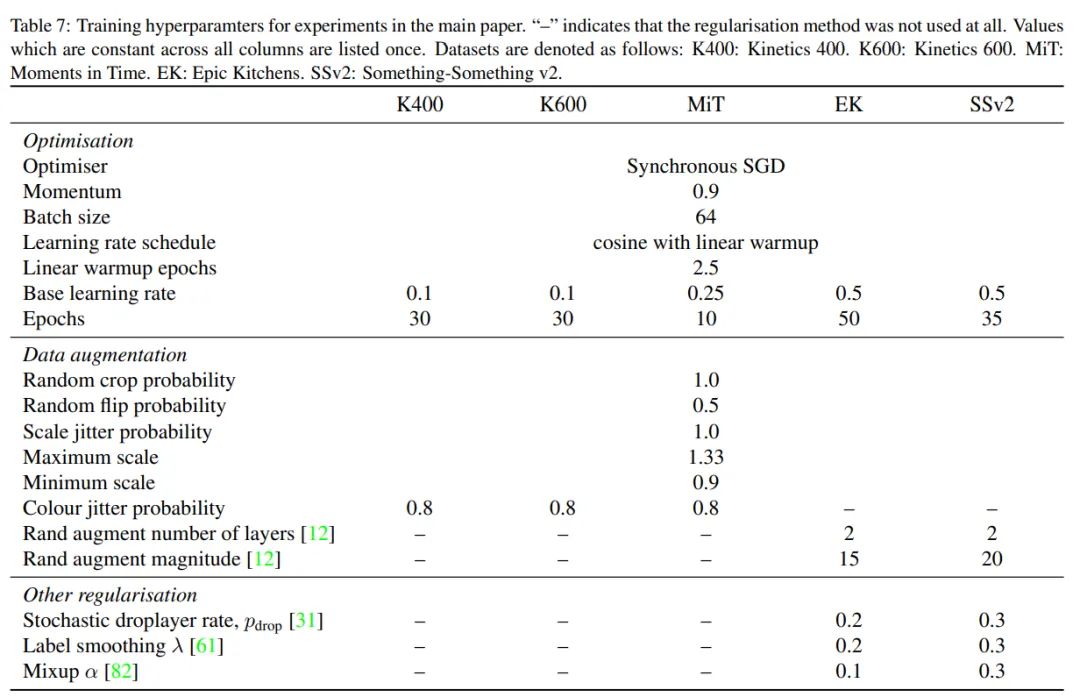
Training config
训练超参数设置详情
六、结论
-
设计了几种不同的VideoViT范式,提出了最有效的Factorised encoder结构。 -
相比TimeSformer,思考的更全面,结构设计上更简单有效。 -
提出了更好的迁移imagenet pretrain到video模型的方法,central frame。 -
提出了tubelet embeeding的方法,更好的获取temporal embeeding信息。 -
多个数据集上取得了SOTA的效果并且大幅度领先。
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“transformer”获取最新Transformer综述论文下载~

# 极市平台签约作者#

FlyEgle
知乎:FlyEgle
欢聚时代算法工程师
领域:OCR, 图像视频内容理解,超分
github: https://github.com/FlyEgle