每日论文 | 机器人操作系统的安全性如何;人类和神经网络谁的泛化能力更好;探究反向传播的生物可靠性
Scanning the Internet for ROS: A View of Security in Robotics Research
随着机器人技术的发展,它们能直接感知并影响现实世界,但同时也带来了很多安全问题。在这篇论文中,研究人员对机器人操作系统的适用范围进行了调查,结果显示很多支持ROS的机器都对公共网络开放,任何人都能进入机器人传感器。同时,研究人员还针对安全问题给出了几点建议。
地址:https://arxiv.org/abs/1808.03322
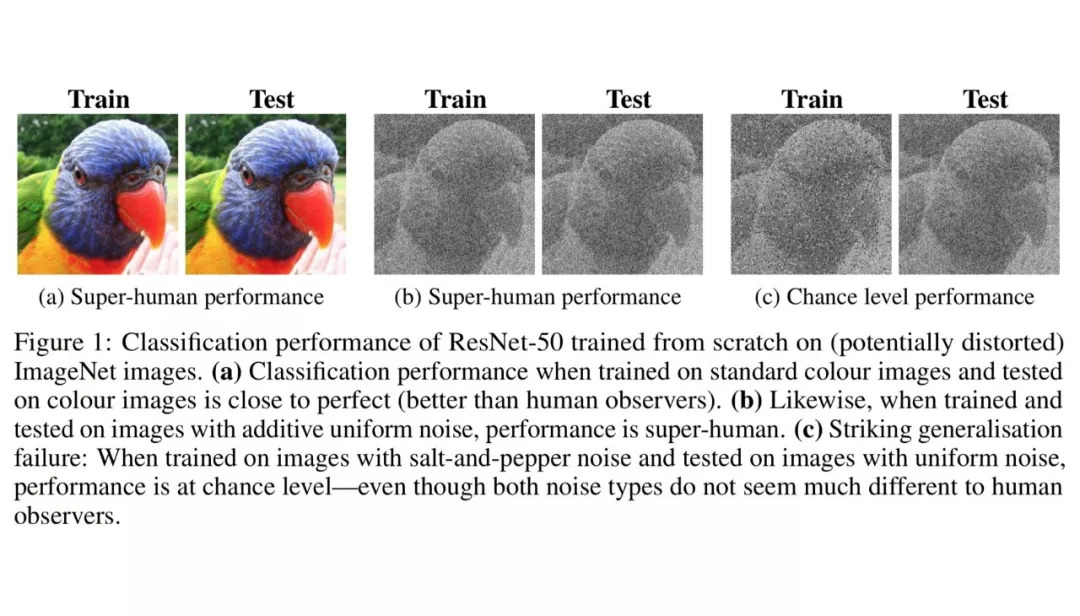
Generalisation in humans and deep neural networks
研究人员对比了人类和当前最先进的卷积深度神经网络在目标辨认上的鲁棒性,让他们对12种难度不同的图像进行目标辨认。在ResNet-152、VGG-19和GoogLeNet三种DNN上,人类的视觉系统稳定性更好。但是之后,那些直接在失真的图片上训练的DNN性能超越了人类,但如果在其他低质量图片上测试,DNN效果又不理想。所以,改变训练和测试数据集中的噪声分布成为深度学习视觉系统中的一大重要挑战。
地址:https://arxiv.org/abs/1808.08750
Backpropagation and Biological Plausibility
反向传播(bp)被视为神经计算算法的一大重要组成部分,也是机器学习的基础。但是,它的计算结构一直是其生物可靠性的争端源头。在这篇论文中,研究人员表示,当在拉格朗日框架中搭建监督学习时,虽然你可以观察到自然的反向传播现象出现,但是也同样可以生成在生物意义上可靠的局部算法。
地址:https://arxiv.org/abs/1808.06934


登录查看更多
相关内容
Arxiv
10+阅读 · 2019年10月3日
Arxiv
3+阅读 · 2018年9月17日




相关VIP内容
相关资讯
相关论文
Arxiv
10+阅读 · 2019年10月3日
Arxiv
3+阅读 · 2018年9月17日