中科院牛津华为诺亚提出:CenterNet,One-stage目标检测最强算法!可达47mAP,已开源!
点击上方“CVer”,选择加"星标"或“置顶”
重磅干货,第一时间送达

作者:段凯文(论文一作)
本文是CVer读者投稿
我们介绍一篇很好的 one-stage 目标检测论文:CenterNet: Keypoint Triplets for Object Detection,该论文是由 中科院,牛津大学以及华为诺亚方舟实验室联合提出。截至目前,据我们所知,CenterNet 应该是 one-stage 目标检测方法中性能最好的方法。
date:20190418
作者团队:中科院,牛津大学,华为诺亚方舟实验室
论文链接:https://arxiv.org/abs/1904.08189
github:https://github.com/Duankaiwen/CenterNet
1. 引言
传统的基于关键点的目标检测方法例如最具代表性的 CornerNet [1] 通过检测物体的左上角点和右下角点来确定目标,但在确定目标的过程中,无法有效利用物体的内部的特征,即无法感知物体内部的信息,从而导致该类方法产生了很多误检 (错误目标框)。本文利用关键点三元组即中心点、左上角点和右下角点三个关键点而不是两个点来确定一个目标,使网络花费了很小的代价便具备了感知物体内部信息的能力,从而能有效抑制误检。另外,为了更好的检测中心点和角点,我们分别提出了 center pooling 和 cascade corner pooling 来提取中心点和角点的特征。我们方法的名字叫 CenterNet,是一种 one-stage 的方法,在最具挑战性之一的数据集 MS COCO [2] 上,获得了47% AP,超过了所有已知的 one-stage 检测方 法,并大幅度领先,其领先幅度至少达 4.9%。
2. CenterNet 原理
我们抑制误检的原理基于以下推论:如果目标框是准确的,那么在其中心区域能够检测到目标中心点的概率就会很高,反之亦然。因此,首先利用左上和右下两个角点生成初始目标框,对每个预测框定义一个中心区域,然后判断每个目标框的中心区域是否含有中心点,若有则保留该目标框,若无则删除该目标框,其原理如图1所。

图1
3. Baseline 和 Motivation
其实不光是基于关键点的 one-stage 方法无法感知物体内部信息,几乎所有的 one-stage 方法都存在这一问题。本论文的 baseline 为 CornerNet,因此首先讨论 CornerNet 为什么容易产生很多的误检。首先,CornerNet 通过检测角点确定目标,而不是通过初始候选框 anchor 的回归确定目标,由于没有了 anchor 的限制,使得任意两个角点都可以组成一个目标框,这就对判断两个角点是否属于同一物体的算法要求很高,一但准确度差一点,就会产生很多错误目标框。其次,恰恰这个算法有缺陷。因为此算法在判断两个角点是否属于同一物体时,缺乏全局信息的辅助,因此很容易把原本不是同一物体的两个角点看成是一对角点,因此产生了很多错误目标框。最后,角点的特征对边缘比较敏感,这导致很多角点同样对背景的边缘很敏感,因此在背景处也检测到了错误的角点。综上原因,使得 CornerNet 产生了很多误检。如图2所示,我们用 CornerNet 对两张图片进行检测,根据每个预测目标框的 confidence 选出 top100 个预测框 (根据 MS COCO 标准),可以发现产生了很多误检。其中蓝色框为 ground truth, 红色框为预测框。
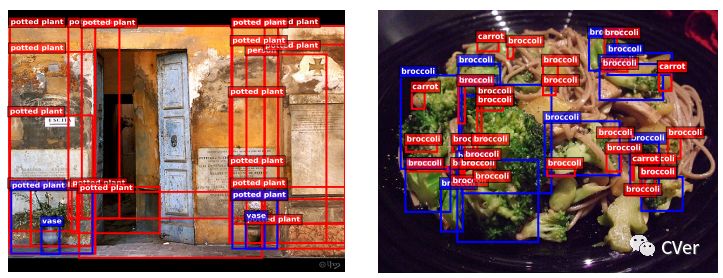
图2
为了能够量化的分析误检问题,我们提出了一种新的衡量指标,称为FD (false discovery) rate, 此指标能够很直观的反映出误检情况。FD rate 的计算方式为 FD = 1-AP, 其中 AP 为 IoU 阈值取[0.05 : 0.05 : 0.5]下的平均精度。我们统计了 CornerNet 的误检情况,如表1所示:
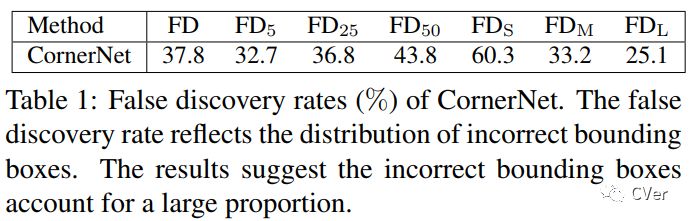
可以看到,FD = 37.8,而 
我们分析出了 CornerNet 的问题后,接下来就是找出解决之道,关键问题在于让网络具备感知物体内部信息的能力。一个较容易想到的方法是把 CornerNet 变成一个 two-stage 的方法,即利用 RoI pooling 或 RoI align 提取预测框的内部信息,从而获得感知能力。但这样做开销很大,因此我们提出了用关键点三元组来检测目标,这样使得我们的方法在 one-stage 的前提下就能获得感知物体内部信息的能力。并且开销较小,因为我们只需关注物体的中心,从而避免了 RoI pooling 或 RoI align 关注物体内部的全部信息。
4. 方法介绍
4.1. 利用关键点三元组检测物体
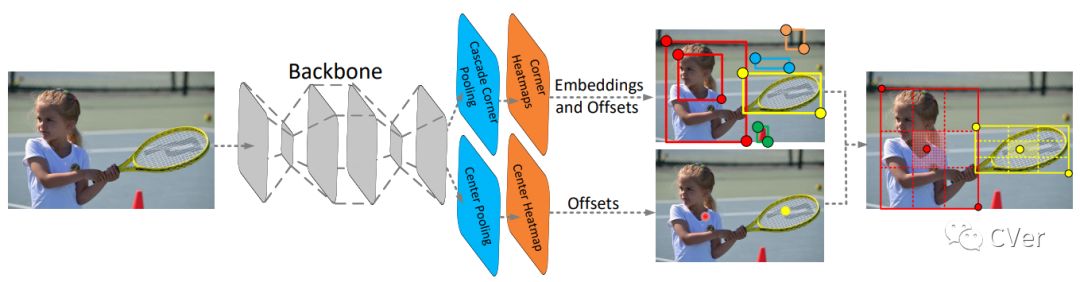
图3为 CenterNet 的结构图。网络通过 center pooling 和 cascade corner pooling 分别得到 center heatmap 和 corner heatmaps,用来预测关键点的位置。得到角点的位置和类别后,通过 offsets 将角点的位置映射到输入图片的对应位置,然后通过 embedings 判断哪两个角点属于同一个物体,以便组成一个检测框。正如前文所说,组合过程中由于缺乏来自目标区域内部信息的辅助,从而导致大量的误检。为了解决这一问题,CenterNet 不仅预测角点,还预测中心点。我们对每个预测框定义一个中心区域,通过判断每个目标框的中心区域是否含有中心点,若有则保留,并且此时框的 confidence 为中心点,左上角点和右下角点的confidence的平均,若无则去除,使得网络具备感知目标区域内部信息的能力,能够有效除错误的目标框。
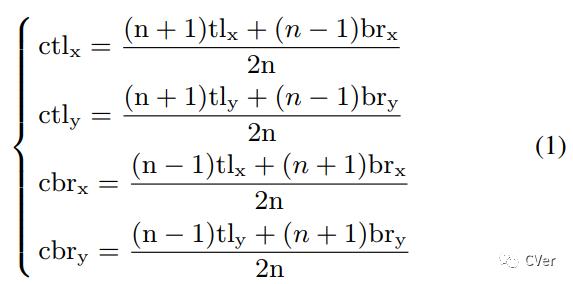
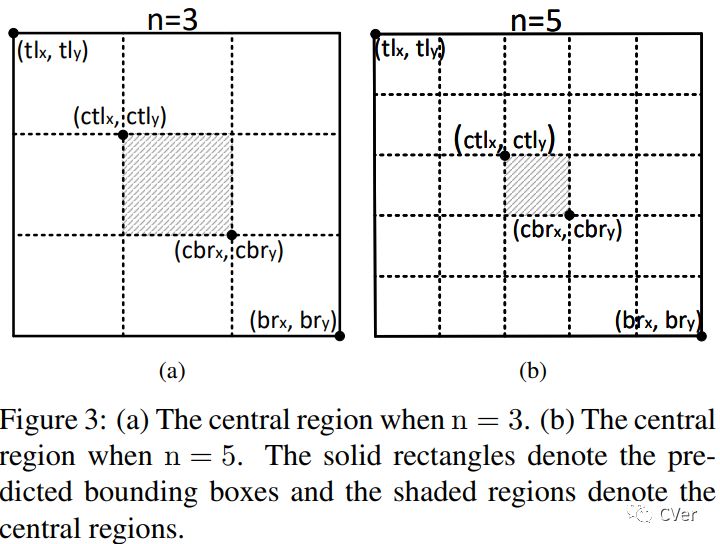
我们发现中心区域的尺度会影响错误框去除效果。中心区域过小导致很多小尺度的错误目标框无法被去除,而中心区域过大导致很多大尺度的错误目标框无法被去除,因此我们提出了尺度可调节的中心区域定义法 (公式1)。该方法可以在预测框的尺度较大时定义一个相对较小的中心区域,在预测框的尺度较小时预测一个相对较大的中心区域。如 Fig3 所示。
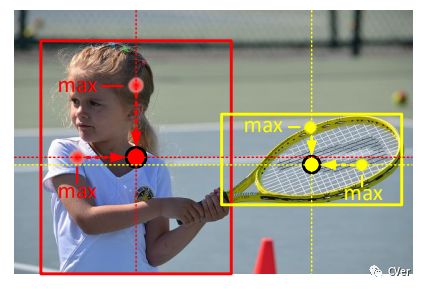
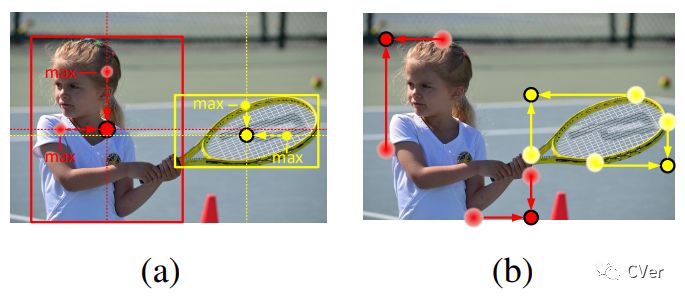
Center pooling:一个物体的中心并不一定含有很强的,易于区分于其他类别的语义信息。例如,一个人的头部含有很强的,易于区分于其他类别的语义信息,但是其中心往往位于人的中部。我们提出了center pooling 来丰富中心点特征。图5为该方法原理,center pooling提取中心点水平方向和垂直方向的最大值并相加,以此给中心点提供所处位置以外的信息。这一操作使中心点有机会获得更易于区分于其他类别的语义信息。Center pooling 可通过不同方向上的 corner pooling 的组合实现。一个水平方向上的取最大值操作可由 left pooling 和 right pooling通过串联实现,同理,一个垂直方向上的取最大值操作可由 top pooling 和 bottom pooling通过串联实现,如图6所示。
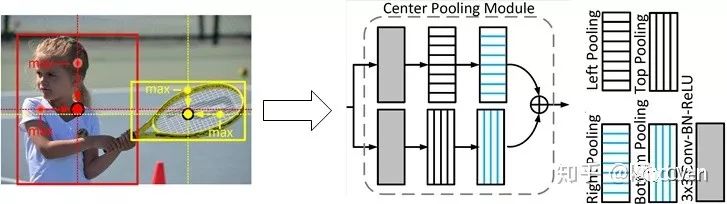
图6
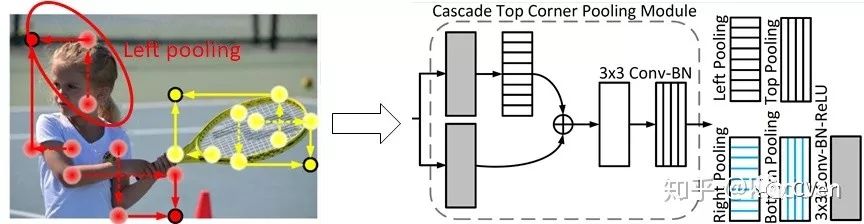
Cascade corner pooling: 一般情况下角点位于物体外部,所处位置并不含有关联物体的语义信息,这为角点的检测带来了困难。图7(b) 为传统做法,称为 corner pooling。它提取物体边界最大值并相加,该方法只能提供关联物体边缘语义信息,对于更加丰富的物体内部语义信息则很难提取到。图7(c)为cascade corner pooling 原理,它首先提取物体边界最大值,然后在边界最大值处继续向内部(图中沿虚线方向)提取提最大值,并与边界最大值相加,以此给角点特征提供更加丰富的关联物体语义信息。Cascade corner pooling 也可通过不同方向上的 corner pooling 的组合实现,如图8 所示,图8展示了cascade left corner pooling 原理。
5. 实验分析
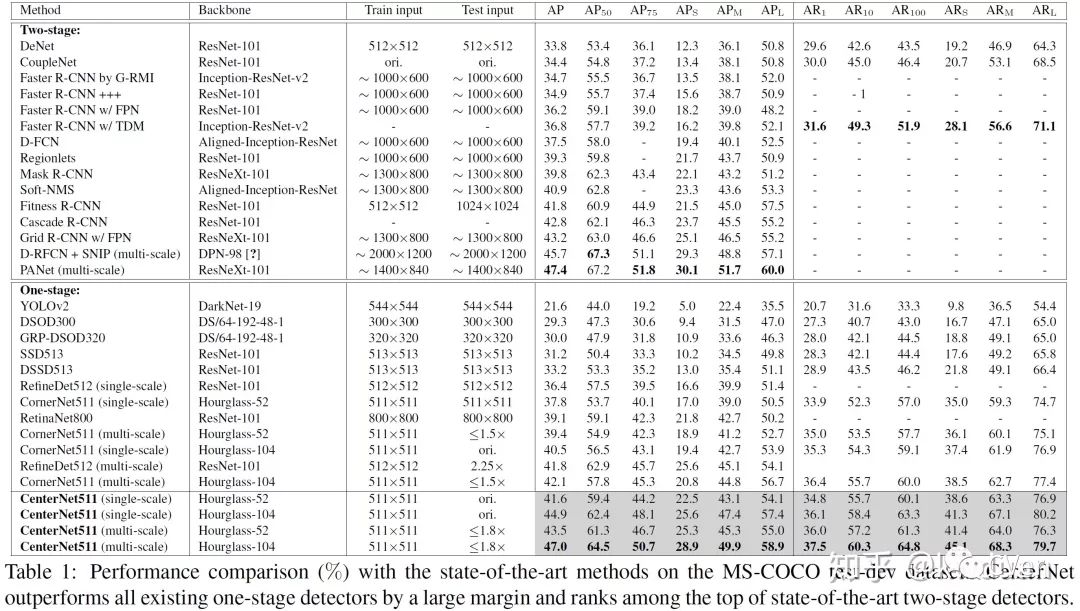
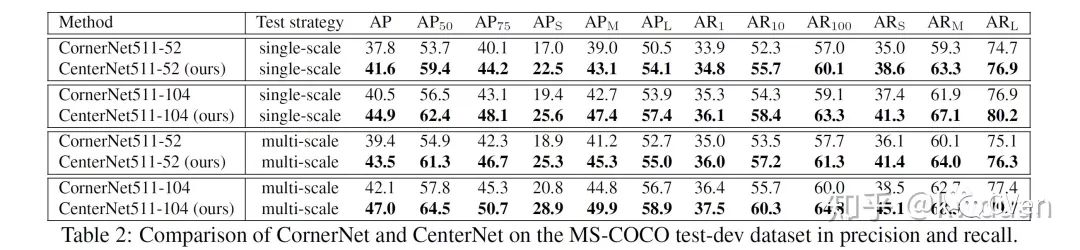
本实验在最具挑战性之一的 MS COCO 数据集上进行测试, 我们选了一些比较有代表性的工作做了对比。实验结果表明 CenterNet 获得了47%的AP,超过了所有已知的 one-stage 检测方法,并大幅度领先,其领先幅度至少达4.9%。Table2为 CenterNet 与 CornerNet 的单独对比。最近目标检测方法在COCO数据集上基本在以百分之零点几的精度往前推进,因为coco数据集难度很高,而我们的 CenterNet 往前推进了将近5个百分点。同时,CenterNet 的结果也接近two-stage方法的最好结果。值得注意的是,CenterNet 训练输入图片分辨率只有 511X511,在 single-scale下,测试图片的分辨率为原图分辨率(~500),在 multi-scale下,测试图片的分辨率最大为原图分辨率的1.8倍。而two-stage的输入图片的分辨率一般最短边也要>600,甚至更大,比如D-RFCN+SNIP [3] 和 PANet [4]。而且我们的方法是 Train from scratch。
速度方面,Two-stage 方法论文中一般是不报的。One-stage方法只在较浅的backbone上如VGG-16上报速度,一般处理一张图片需要十几毫秒,在较深的backbone上速度为慢一些,处理一张图片需要几百毫秒,但还是要比 two-stage 的方法快。在这里,我们在一张 Nvidia Tesla P100 显卡上比较了CornerNet和CenterNet,CornerNet511-104 测试速度约为 300ms/帧 (并没有实现原论文所说的250ms/帧的速度,可能是与我用的服务器环境有关),而 CenterNet511-104 的测试速度约为340ms/帧,比 baseline 慢约 40ms/帧。但对于更轻backbone,CenterNet511-52的测试速度约为270ms/帧,比CornerNet511-104快约30ms/帧,而且其精度无论是single-scale test 还是 multi-scale test 都比CornerNet511-104高。
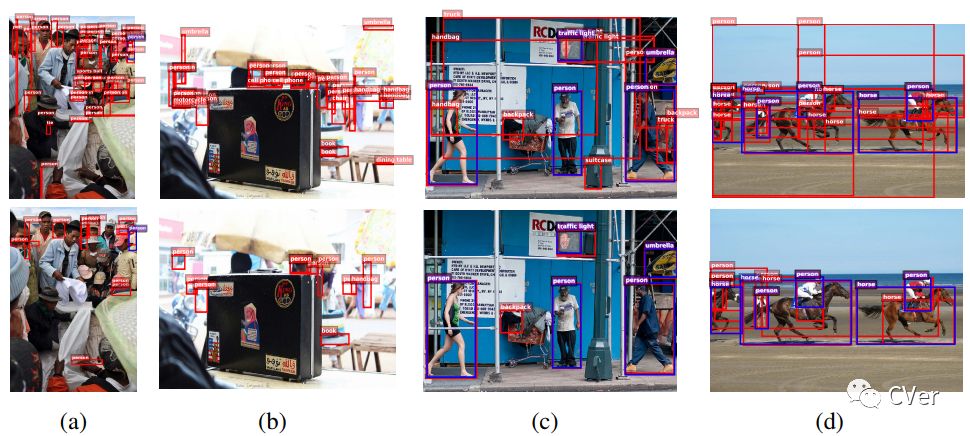
CenterNet 以 CornerNet为 baseline,后者为最具代表性的基于关键点的目标检测方法。上图展示了 CenterNet 与 CornerNet 的对比结果。(a) 和 (b) 表明 CenterNet 能有效去除小尺度的错误目标框。(c) 和 (d) 表明 CenterNet 能有效去除中等尺度和大尺度的错误目标框。

上图为 CenterNet 的检测结果。由于 CenterNet 去除了大量错误的目标框,因此即使在目标框的 confidence 较低的情况下,依然能保证较好的检测结果,上图展示了 confidence 在0.5以上的目标框分布情况。
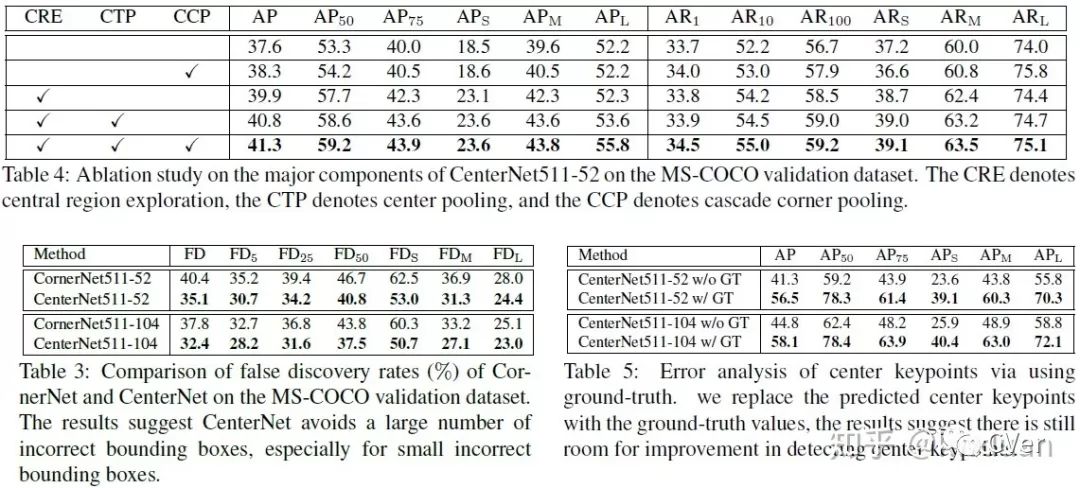
Table4 为消除实验。第一行为 CornerNet 结果。中心点的加入 (CRE) 使得网络提升了2.3% (37.6% vs 39.9%)。对于中心点的检测,本实验使用传统的卷积操作进行。其中小尺度目标提升的最多,提升了4.6% (18.5% vs 23.1%), 而大尺度目标几乎没有发生变化。这说明小尺度的错误目标框被去除的最多,这是因为从概率上讲,小尺度目标框由于面积小更容易确定其中心点,因此那些错误的小目标框不在中心点附近的概率更大,因此去除的最多。Center pooling (CTP) 的加入使网络进一步提升了0.9%。值得注意的是,大尺度目标提升了1.4% (52.2% vs 53.6%),小目标和中等目标也得到了一定的提升,这表明 center pooling 能够使中心点获得更易于区分于其他类别的语义信息。Cascade corner pooling (CCP) 使得使网络性能进一步提升。第二行的试验中,我们将 CornerNet 的corner pooling 替换成了 cascade corner pooling,性能提升了0.7% (37.6% vs 38.3%)。可以观察到大目标的 AP 没有发生变化,AR 却提升了1.8% (74.0% vs 75.8%), 这说明 cascade corner pooling 通过加入了物体内部信息能够感知更多的物体,但是由于大目标由于面积过大,使其容易获得较明显的内部特征而干扰了边缘特征,因此使得预测出的目标框位置不精确。当结合了 CRE 后,由于 CRE 能够有效去除错误目标框,因此使大目标框的AP得到了提升 (53.6% vs 55.8%).
Table3 为错误目标框的去除实验的对比。实验结果表明 CenterNet 去除了大量的错误目标框,尤其是小尺度的错误目标框,这也是为什么小尺度目标的 AP 提升最多的原因。
Table5 为错误实验分析。我们将检测的中心点用真实的中心点代替,实验结果表明中心点的检测准确度还有很大的提升空间。同时该结果还表明要想更进一步的提升检测精度,需要进一步提升角点的检测精度。
6. 总结
前文提到 one-stage 方法都无法感知物体内部信息,这是由于 one-stage 直接对 anchor 进行回归和分类,这个过程并没有像 two-stage 方法一样利用到了物体内部特征,因此无法感知物体内部信息。本工作主要研究了基于关键点的 one-stage 方法,在接下来的工作中,我们将扩展到更广义的 one-stage 方法,如 SSD[5] 等方法,以及更多的 backbone,例如VGG-16,resnet101等。
参考文献:
[1]. H. Law and J. Deng. Cornernet: Detecting objects as paired keypoints. In Proceedings of the European conference on computer vision, pages 734–750, 2018.
[2]. T.-Y. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Doll´ar, and C. L. Zitnick. Microsoft coco: Common objects in context. In European conference on computer vision, pages 740–755. Springer, 2014.
[3]. B. Singh and L. S. Davis. An analysis of scale invariance in object detection snip. In Proceedings of the IEEE conference on computer vision and pattern recognition, pages 3578–3587, 2018.
[4]. S. Liu, L. Qi, H. Qin, J. Shi, and J. Jia. Path aggregation network for instance segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, pages 8759–8768, 2018.
[5]. W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C.Y. Fu, and A. C. Berg. Ssd: Single shot multibox detector. In European conference on computer vision, pages 21–37. Springer, 2016.
论文已开源,快快star该项目,并下载使用吧!
论文链接:https://arxiv.org/abs/1904.08189
代码链接:
https://github.com/Duankaiwen/CenterNet
推荐阅读
物体检测的轮回:Anchor-based 与 Anchor-free
最新的Anchor-Free目标检测模型FCOS,现已开源!
CVer目标检测交流群
扫码添加CVer助手,可申请加入CVer-目标检测交流群。一定要备注:目标检测+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡)

▲长按加群
这么硬的论文,麻烦给我一个在看

▲长按关注我们
麻烦给我一个在看!




