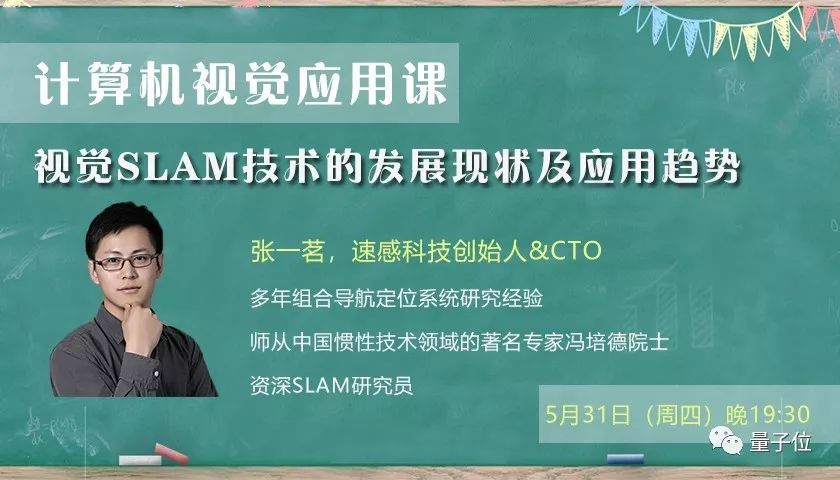
报名 | 速感科技CTO张一茗:视觉SLAM的现状及应用发展趋势
机器人在未知场景中移动时,通常会遇到定位与地图的基础问题,作为新手级小白如何解决这些基础问题,给机器人一双慧眼,vSLAM该如何实现?三维深度传感器的不同技术路线有何差异?
5月31日(周四)晚19:30,量子位·吃瓜社邀请到速感科技CTO张一茗,带来一节视觉SLAM方向的计算机视觉应用课。他将从机器人市场目前状况、以及SLAM技术的崛起与发展讲起,对三维深度传感器不同技术路线进行比较,跟大家一起讨论vSLAM如何实现及其应用问题。
嘉宾介绍

张一茗
速感科技创始人&CTO
毕业于北京航空航天大学,师从中国惯性技术领域的著名专家冯培德院士,多年组合导航定位系统研究经验,机器人爱好者及资深SLAM研究员。
学术研究上发表多篇相关领域论文,经过长期积累开发出以vSLAM为核心,集探索、导航、定位、避障、路径规划为一体的成熟化机器人无源导航算法。
分享提纲
1、机器人市场现状
2、SLAM技术的崛起与发展
3、机器人视觉传感器的演进史
4、三维深度传感器的不同技术路线及差异比较
5、vSLAM如何实现及其应用问题
活动详情
活动时间
5月31日(周四)晚19:30
活动形式
线上直播(内部群分享)
如何参与

扫码添加量子位小助手7:qbitbot7,备注“吃瓜社”,通过后即可获取参与方式,报名成功后可加入活动群,与嘉宾以及其他小伙伴互动交流,还能在第一时间获取分享PPT、视频回放、量子位文字整理材料。
本次直播参与方式略有不同,已经在量子位社群的同学请联系相应小助手,带上暗号“吃瓜社”,获取参与方式~
主办

速感科技
机器视觉为核心的人工智能创业公司,行业内领先的视觉导航定位方案提供商。公司核心技术人员是国内最早从事视觉定位导航算法研发的技术团队,高级管理层成员来自美国宾夕法尼亚大学沃顿商学院、清华大学经管学院等。累计获得4轮次12家中美投资机构超过1亿元融资。
量子位
追踪人工智能产品和技术新趋势,我们只专注报道AI。
— 完 —
诚挚招聘
量子位正在招募编辑/记者,工作地点在北京中关村。期待有才气、有热情的同学加入我们!相关细节,请在量子位公众号(QbitAI)对话界面,回复“招聘”两个字。

量子位 QbitAI · 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态