突破!MIT通过简单的机器人系统,可批量相同小部件组装出整架飞机,甚至整座建筑物!
导读
如果你能制造出一架大型喷气式飞机,那么你就可以建造一座大楼。美国麻省理工学院研制出微型组装机器人“BILL-E”,只要通过简单的机器人系统,就能用批量相同的小部件组装出机翼、整架飞机,甚至整座建筑物。
作者:pumpkin酱

当最终组装变成了唯一组装
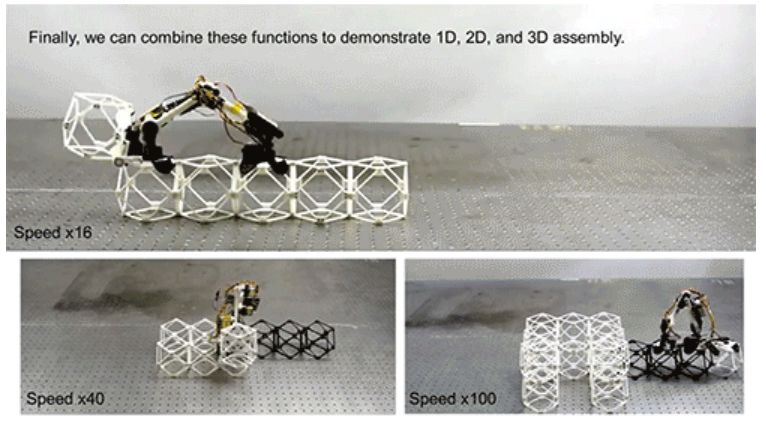
新型机器人装配系统的运作
 图注:
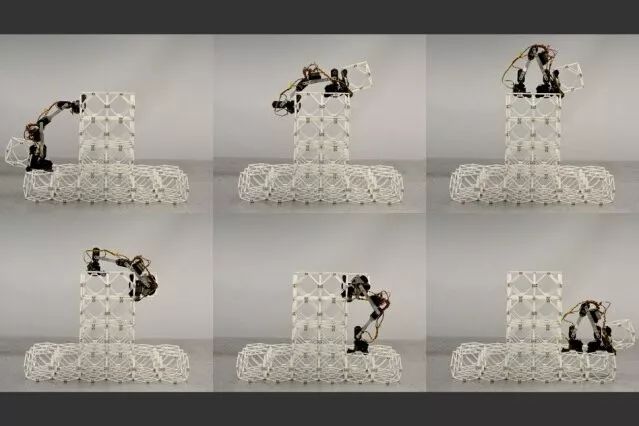
两个原型装配机器人正在工作,将一系列称为体素的小单元组装成一个更大的结构。
图注:
两个原型装配机器人正在工作,将一系列称为体素的小单元组装成一个更大的结构。

机器人系统新领域
END
招聘内容编辑
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!

看累了吗?戳一下“在看”支持我们吧!
登录查看更多
相关内容

专知会员服务
61+阅读 · 2019年12月29日
专知会员服务
104+阅读 · 2019年10月22日
Arxiv
7+阅读 · 2019年1月18日
Arxiv
7+阅读 · 2018年8月7日




相关VIP内容
专知会员服务
61+阅读 · 2019年12月29日
专知会员服务
104+阅读 · 2019年10月22日
相关资讯
相关论文
Arxiv
7+阅读 · 2019年1月18日
Arxiv
7+阅读 · 2018年8月7日