斯坦福机器人制造者吴恩达:生活中的机器人,将是专用机器人
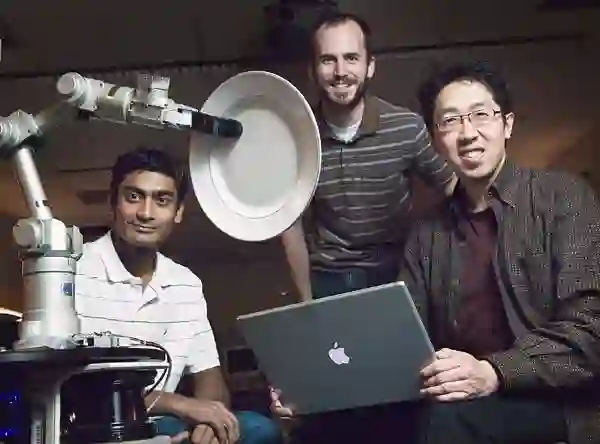
研究生Ashutosh Saxena(左),Morgan Quigley(中)和吴恩达参与了一项大型研究项目,旨在开发一款机器人,用于观察不熟悉的物体并确定抓取它的最佳位置。
作者 | TAYLOR KUBOTA
来源 | 斯坦福大学新闻
编译 | Nurhachu Null
几十年来,斯坦福大学一直在发明机器人的未来。这一未来最早始于 20 世纪 60 年代的一艘登陆月球的探测器,以及最早的人工智能机器人之一——「Shakey」。在那个时候,很多人把机器人想象成下一代的家庭帮佣,装洗碗机,调马提尼酒。然而,绝大多数机器人已经从这些早期雄心壮志的家用场景转移到了工厂,因为机器人能力受到现有技术的限制,又重也危险,没办法和人类共处一室。
但是,对更柔软、更温和、更智能的机器人的研究仍在继续。在很大程度上,由于计算能力的进步,机器人研究如今正蓬勃发展。仅在斯坦福大学,机器人就能攀爬墙壁,像鸟儿一样振翅高飞,在地球和海洋深处乘风而行,与宇航员在太空中闲逛。而且出于对祖先的敬意,他们不再像过去那样摇摇欲坠了。
本文作者 Taylor Kubota 制作了一个系列采访,介绍了斯坦福大学这些机器人宝藏,以及打造他们的教师及其学生。本文的主角是斯坦福大学计算机科学副教授吴恩达。现在,他专注于人工智能在许多领域的应用,比如医疗、教育和制造业,这也是他更为人所知的经历。但在斯坦福的头十年里,他却在致力于自主直升机和 STAIR(STanford AI Robot)项目的研究。
是什么激发了您对机器人的兴趣?
我一直在捣鼓机器人。举个例子,我记得高中的时候,我和朋友参加了一个竞赛,做了一个机械臂来操纵棋子在棋盘上移动。现在看来这是微不足道的,但在当时,机器人还是一个新生的事物,并且作为高中生,我们认为制作机器人就是在干一件大事。
现在,我经常看到高中生在做这件事,如果有人在十年前做这件事,那可能会在学术会议上拿到最佳论文奖。因此,我们的领域进步很大!
您的第一个机器人项目是什么?
在加州大学伯克利分校做博士论文期间,我记得自己问过很多人这么一个问题:机器人学中最难的问题是什么?一些朋友向我推荐了直升机,所以我最后写了一篇关于自动控制直升机飞行的博士论文。后来,我在斯坦福大学最早期的博士生 Pieter Abbeel 和 Adam Coates 做了一项卓越的工作,他们的工作将自动控制直升机飞行研究推到了很高的水平,坦率地说,我们在这方面已经没有什么可以做的。他们做得太好了,我们不得不停掉这项研究。
后来,我开始研究机器学习、计算机视觉与感知。彼时,大家都在研究 AI 问题的不同子集,我觉得,有一个叫做 STAIR 的项目——斯坦福人工智能机器人——将有助于将 AI 各个方面的能力综合在一起。这是一个通用机器人,很大程度上受到了 Shakey 的启发,Shakey 是第一个人工智能机器人。
我认为 STAIR 最重要的成果之一是 ROS(机器人操作系统)。今天,如果你去任何从事机器人研究的大学,他们都在用 ROS。ROS 甚至已经离开了我们的星球,它现在已经运行在国际空间站的机器人上。此外,ROS 现在由一个 20 人组成的非营利组织 Open Source Robotics Foundation(开源机器人基金会)维护,我的博士生 Morgan Quigley 是这个非营利组织的联合创始人之一。
说起这一切,我仅仅是一名教授。老实讲,大部分工作是由我的博士生完成的,他们是这件工作背后真正的英雄。
回想一下,您当时希望机器人在「未来」能做些什么?
我在读高中的时候就去实习了。我是办公室助理的助手,做了很多复印的工作。记得我当时就在想,如果我能把所有的复印工作自动化,也许我就能够把时间花在其他事情上。这是促使我想出如何自动执行很多重复性任务的动力之一。

吴恩达在 STAN(科学、技术、艺术和自然)活动中做关于自动控制直升机的演讲
即使到了今天,我仍然认为人们对人工智能知之甚少。今天,人工智能的主要能力并不是制作有感知的机器人,而是自动化。
有一件不幸的事情是,现在既有人工通用智能,也有人工专业智能(artificial specialized intelligence)。近期几乎所有的项目都有用AI去完成特殊的任务。通用人工智能让人们构想出了邪恶、杀人机器人,它们可能奴役我们所有人。或许距离AI具有通用智能还有成百上千年,但是甚至还没有一个人能够清楚地看到这一点。
您现在所做的哪些工作与机器人有关?
我在机器人学方面的博士背景实际上是一个控制项目——控制就是让机器人执行特定任务的方式。但是在 STAIR 项目中,我们意识到,感知是一个更紧迫的问题。感知问题是机器人如何与它周围的环境互动,它如何精确地感知环境并告诉我们,例如,「人在哪里,门把手在哪里,订书机在哪里。」
我的博士生 Ashutosh Saxena 做了一项非常特别的工作,他让机器人捡起它以前从未见过的物体。当他这样做的时候,争议很大,但是现在从事机器人领域的每个人都会觉得这是正确的方向。那时,我让研究小组开始将大部分时间花在深度学习上,因为这是解决许多开放感知问题的最佳方法。
但愿有朝一日我们能够将它与机器人联系起来,但是我们现在并不专注于此。STAIR 的具身还存活着,而且状态很好。我们早期有很多关于机器人应该如何抓取日常物品的想法,这些想法对研究而言是至关重要的。
在您从事机器人研究的这段时间里,机器人学的总体目标或者大趋势发生了什么变化?
在过去的五年里,深度学习的兴起带来了翻天覆地的变化,因为深度学习让机器人可以看得更加清楚。在其他领域也有进展——更多的控制工作、机械工程和材料工作。与五年前相比,现在有了更好的感知解决方案。这为机器人技术的应用创造了更多的机会。
至于像 Shakey 和 STAIR 一样的通用机器人,那都是以研究为重点的。研究将会持续尝试制作通用机器人,因为研究推动了一个探索基础科学问题的过程。对于可能在不久的将来出现在我们生活中的机器人,我觉得它们会是专用机器人。例如,我的一名学生有一个机器人,它最近已经被购买用于农业了。

原文链接:
https://news.stanford.edu/2019/01/16/stanfords-robot-makers-andrew-ng/