【泡泡机器人新闻社】飞艇机器人——探索隐藏在胡夫金字塔里的秘密
选文| 张晨 翻译| 胡琪 叶培楚 徐礼达 周艺
校对| 张晨 编辑| 张晨 胡琪
素材来源:IEEE SPECTRUM
泡泡机器人推广内容组编译作品

图1 机器人飞艇与管状设备对接时状态
01
上个月,来自埃及开罗大学工程学院和法国的HIP研究所的研究人员宣布他们的项目——ScanPyramids项目,使用了μ成像技术发现隐藏在胡夫金字塔(也被称为吉萨大金字塔)深处的一个大空洞。没有人知道里面有什么东西,或者里面什么都有,甚至这也是就是星际之门所藏之地。显然,这里有很多关于金字塔里的内容值得研究,它或许可以帮助解决诸如金字塔是如何或者为何建造的奥秘。
问题是我们不会挖掘大金字塔里来看看的到底发生了什么。在2002年,埃及古物学家使用了一个定制的探测机器人(由IRobot制造)来探索一个由大门封闭的大金字塔女王室的小竖井。为了避免探索过程可能会对建筑产生破坏,机器人并没有试图打开门,而是钻了一个足够让相机通过的小洞,努力对古代世界这独一无二的奇迹做最小程度的不可逆转的破坏。但他们在另一侧只发现了另一扇门。如果我们想要探索金字塔,我们将不得不通过尽可能小的洞来实现。
法国研究机构Inria和CNRS正为ScanPyramids项目开发一款探索机器人,它可以通过挤压的方式通过微小的孔洞同时仍然可以最大限度的进行探测。他们提出了机器人飞艇的概念,可以塞进一个3~5厘米的洞,展开和膨胀,然后在放气和返回之前探测更大面积的空间。
该系统由两个机器人组成,两个机器人人都足够的小,可以通过钻出3~5厘米直径的洞来穿过尽可能多的古代遗迹。管状机器人配备了全向摄像头,可以先进行测量,再发回高质量的图像。
如果一切都看起来是安全的,相同的洞被用来插入一个折叠起来的微型机器人飞艇。一旦进入,该飞艇就会充满氦气,展开直径达80厘米。然后用50克有效载荷的电机和传感器(包括灯光,照相机和辅助导航系统)将其卸下并浮起。一旦完成任务,飞艇返回,放气并重新折叠,然后直接从同一个洞里出来。
02

图2 管状摄像机器人的3D渲染图
利用一个可折叠的飞行机器人进行探索听起来可能增加不必要的复杂和危险性,但仍然有相当多好的理由说明为什么它比其他装备有轮子,履带,或者机器腿,或者带旋翼无人机的方法好。小型飞船不需要担心楼梯,岩石和坡道(或陷阱)。你可以从小型飞船中获得更加好的视角,并且还可以尽可能快地覆盖更多的区域。小型飞船还可以无损地从障碍物中反弹回来,不像传统的旋翼飞机那么容易崩溃,你必须知道,软式小型飞船只会在自然界中非常像枕形的地方坠毁(如果可能发生的话)。
为了了解更多有关小型飞船如何工作的细节,我们咨询了带领团队开发该系统的INRIA高级研究员Jean-Baptiste Mouret博士。
03
Question: 如何确定孔的直径是3.5cm?为何不采用更大尺寸的孔来使工作更简单?
Jean-Baptiste Mouret: 这是一个这种方案:一方面,我们想钻一个尽可能小的孔,尽可能不改变建筑;另一方面,又必须足够大,能够适合所有我们需要的执行器,传感器以及机械设备等。除了留下更大的痕迹,打孔可能会影响建筑的完整性(注意,我们针对的是有数千年历史的建筑),另外我们还得最小化坍塌的风险。当然,我们喜欢这个挑战:如果钻的孔大了,那么就不需要尝试新的设计以及许多奇思妙想的可能性了。
Question:将所有必要的硬件装配成这样一个小直径的挑战是什么?
Jean-Baptiste Mouret: 在所有小型化的常用技术挑战中,我们需要机械切割或者3D打印出许多小部件,另外还需要大量的活部件——例如,我们当前管式机器人的设计有超过140个滚球轴承。我们从Ultimaker 2 3D打印机开始,因为它比机械切割和3D打印更快,使我们能够做出高度复杂的形状,但是它也很难做出小部件。我们最近买了一台2型3D打印机,在生成小的以及复杂的部件时,简直不可思议。我们的原型现在好多了,我们一天可以打印几次新部件。
Question:我读到飞艇将配备“生物感应传感器和原理”。你能详细说明一下吗?
Jean-Baptiste Mouret: 由于信封的氦气量,飞艇的吊舱重量不能超过50克。 有了这个质量,我们就不能携带Kinect,激光雷达或类似的高清晰度传感器。 做任何需要复杂计算的事情也很困难,因为这会显著影响自主性。 而机器人将不能使用GPS,因为它将在建筑物内部。 因此,我们需要别的东西。
这就是为什么我们联系马赛的法国科学研究院(CNRS / Aix-MarseilleUniversité),它从蜜蜂和苍蝇身上获得灵感,为小型无人机开发了几种非常轻便的传感器。 更确切地说,我们感兴趣的是以下两个传感器:
一是可在低光照条件下工作的微型光流传感器。已经确定,昆虫具有对光流敏感的神经元,也就是由观察者(眼睛或相机)和场景之间的相对运动产生的视觉场景中的物体,表面和边缘的视角速度的矢量场。昆虫依据这些视觉神经元和少量的神经元起飞,着陆和避开障碍(通过平衡左侧和右侧的光流)。我们的飞行机器人使用相同的策略,如果它失去无线电信号链路并帮助飞行员避开障碍物,能够返回到其基地。本质上,我们将一个光流传感器,一个磁力计和一个指向地面的距离传感器相结合,以便机器人可以“重放”它的路径。
我们也有兴趣在同一个研究所开发的第二个微型传感器HyperCube,它可以做一个非常小的包装(1厘米3 / 0.33克),而主动标记跟踪(红外闪烁发光二极管在飞艇上)。该传感器在昆虫中使用“过度骚扰”的概念:能够以比理论(静态)分辨率更高的分辨率定位对比物体,其可以通过扫描传感器的运动(例如振动)来引起,或者像 HyperCube,具有高频闪烁LED(> 1 kHz)。 我们需要这个传感器,让我们的微型飞艇精确降落在坞站上。
Question:你能描述一下这个飞艇将如何对接,然后放气并重新塑造自己?
Jean-Baptiste Mouret: 膨胀和折叠是这个概念的两个主要挑战。为了对接,我们将依靠HyperCube传感器精确地登陆平台。对于膨胀/紧缩/折叠,我们正在探索几种方法,并且我们已经在实验室中进行了一些实验,但现在发现我们会选择哪种方法还为时尚早。很明显的是,我们不能把电子器件和信封放在有一千年历史的纪念碑里面。我们真的需要一个可靠的提取技术。
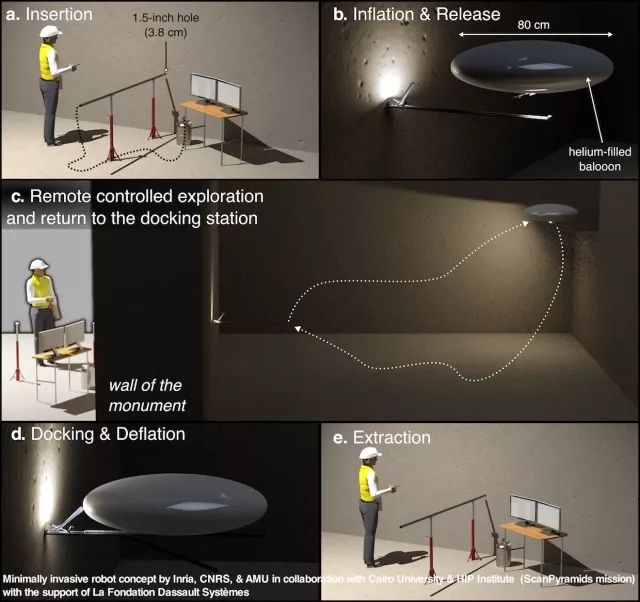
图3 机器人飞艇探测的过程
Question:用这种小的进入孔和没有绳栓住的飞行机器人,你是否会担心机器人丢失在金字塔里?
Jean-Baptiste Mouret: 实际上,小型机器人,比如飞艇或者四旋翼,不能携带绳,因为即使是很轻的绳对他们来说也太重了,拖地的绳会增加摩擦力,而且当我们想要完成复杂飞行动作时会造成严重的干扰。
这就是为什么我们使用轻量级的仿生传感器来设计一个虚拟的绳:机器人需要自主的返回,即使失去了无线电信号,他也要能够自动的降落(因此我们不需要高超的驾驶技巧)。
如果出现了问题,比如说一个电机不动了,我们需要智能的纠错算法去切换到另一个飞控算法。这种算法在轻型的嵌入式硬件实现(许多东西已经被预计算了),并不需要诊断(在小型机器没有内传感器的情况下是个挑战)。
Question:这种机器人有没有其他的潜在应用价值?
Jean-Baptiste Mouret: 除了考古,我们也和核工业的人讨论了在日常检查或灾后检测方面的应用。我们也正在探索其他领域,需要把飞行器从小洞送入的场合很多。
Question:如果让你选一个最令人激动,最有意义的地点来首次使用机器人,那会是哪里?
Jean-Baptiste Mouret: 最令人激动的地点无疑是大金字塔,最近“扫描金字塔”项目利用宇宙射线μ介子探测器在其中发现了至少三个重要的空洞,在大画廊上方有一个,北面的走廊有一个,东北的边上有一个。我们最近加入了“扫描金字塔”团队,分析了这个项目的一些限制条件,现在已经万事俱备。但是“扫描金字塔”团队需要先优化空洞的位置,我们在行动前也需要埃及的授权。现阶段把我们的机器人送入大金字塔还停留在设想阶段,没有一个确定的计划,我们可能会先在其他地方使用这个机器人。
Mouret说他们已经有了第一个机器人原型机,以及带有照明和摄像头的导管探测器来进行第一次实验。飞艇还是有点问题,他们仍在设计一个系统用来充气,部署,之后回收,折叠。“扫描机器人”决定在哪里进行探索时,机器人有望可以投入工作。

#泡泡机器人新闻社-往期回顾#
【泡泡机器人新闻社】Hinton's Capsule Networks详解---Intuition
【泡泡机器人新闻社】使用AI和VR技术来教授机器人新技能(内附演示视频和文献)