夜间场景缺数据,如何进行语义分割?浙大提出基于GAN的高鲁棒夜间语义分割框架
作者 | BBuf
单位 | 北京鼎汉技术有限公司 算法工程师(CV)
编辑 | 唐里
浙大提出一种新的方法,通过将GAN和SOAT分割框架结合,实现对夜间图像也具有鲁棒的分割效果。
论文发表于2019年,地址为:https://arxiv.org/abs/1908.05868
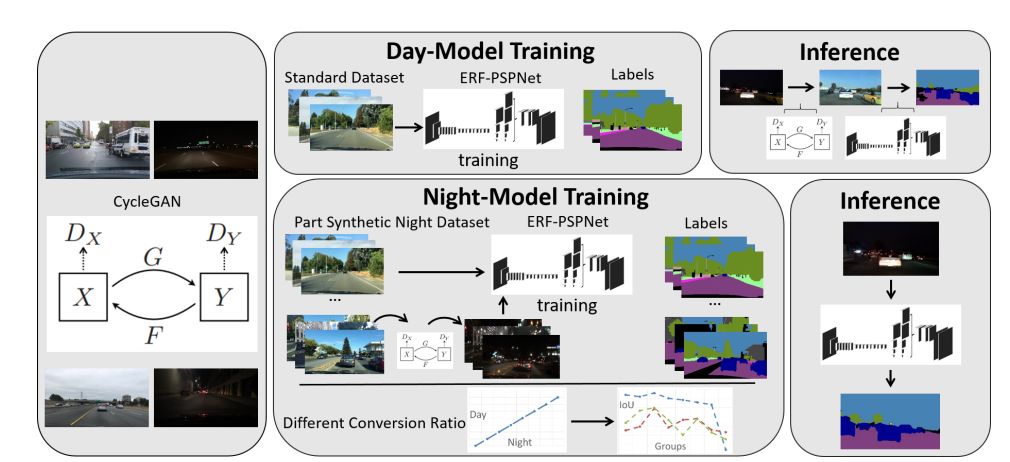


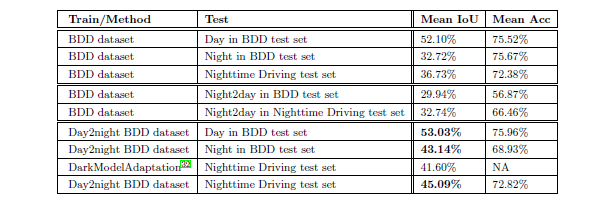
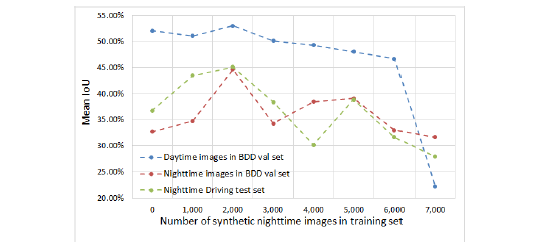
我们可以看到使用2000张合成的夜间图像的训练集得到的效果是最好的。然后在5000的时候曲线达到另外一个峰值,这个原因可能是5000是2000的对称数(总数是7000),并且该模型以互补的方式从白天图像中学习纹理信息,从夜晚图像中学习光照信息,但是此时白天的性能已经降低到了一个较低的水平。当所有图像均为夜间图像时,IOU甚至低于30%,这是因为合成图像中的纹理不等同于真实图像中的纹理。综上所述,使用2000张合成的夜间图像和5000张真实白天图像的训练集得到的效果是最好的。
参考资料:



登录查看更多
相关内容

专知会员服务
32+阅读 · 2020年2月24日
Arxiv
4+阅读 · 2019年1月17日
Arxiv
15+阅读 · 2019年1月15日



相关VIP内容
专知会员服务
32+阅读 · 2020年2月24日
相关资讯
相关论文
Arxiv
4+阅读 · 2019年1月17日
Arxiv
15+阅读 · 2019年1月15日