从刺激战场到空间物理,用听声辩位的原理定位射电源
听声辨位
是一种在“刺激战场”游戏中常用的技巧
这种技巧的科学原理是
双耳效应
即
当声源(包括复杂的集群信号)
偏向左耳或右耳
即偏离两耳正前方的中轴线时
声源到达左、右耳的距离存在差异
这将导致到达两耳的声音
在声级、时间、相位上存在着差异
这种微小差异被人耳的听觉所感知
传导给大脑
并与存贮在大脑里
已有的听觉经验进行比较、分析
得出声音方位的判别
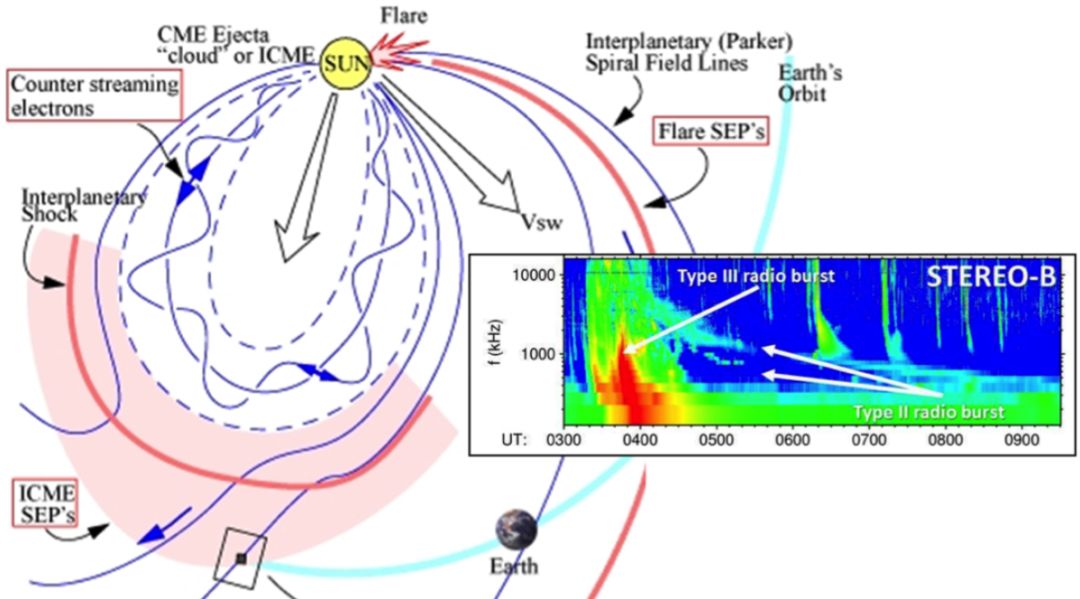
这种思路
如今被用作定位在行星际中传播的
太阳III型射电暴的源区的轨迹
太阳III型射电暴
是一种由高能电子的束流效应产生的
无线电波段(GHz-kHz)的电磁波
太阳表面的剧烈能量释放过程
往往伴随着高能电子的产生
而高能电子沿着开放磁力线向行星际外传播
就形成了三型射电爆
我们需要定位III型射电爆的源区
因为III型射电暴的源区位置
可以给我们提供更多
关于高能电磁的产生传播信息
而定位三型射电爆方法的灵感
正是来源于“刺激战场”游戏中的听声辨位
本文开头所说的听声辨位
对应的波是声波
声波在空气中的传播速度是340m/s
所以对应一个15cm的两耳距离
远处的声源可以产生毫秒级的时间差
这种时间差虽然不会被上级神经(大脑)感知到
但是低级神经可以分辨出来
并预处理得到声源的方位信息
而这里我们想定位的波是射电波
是电磁波的一种
大家所熟悉的电磁波
传播速度是300000000m/s
所以
想要通过类似听声辨位的方法来定位III型爆
就需要安放非常非常远的多个“耳朵”
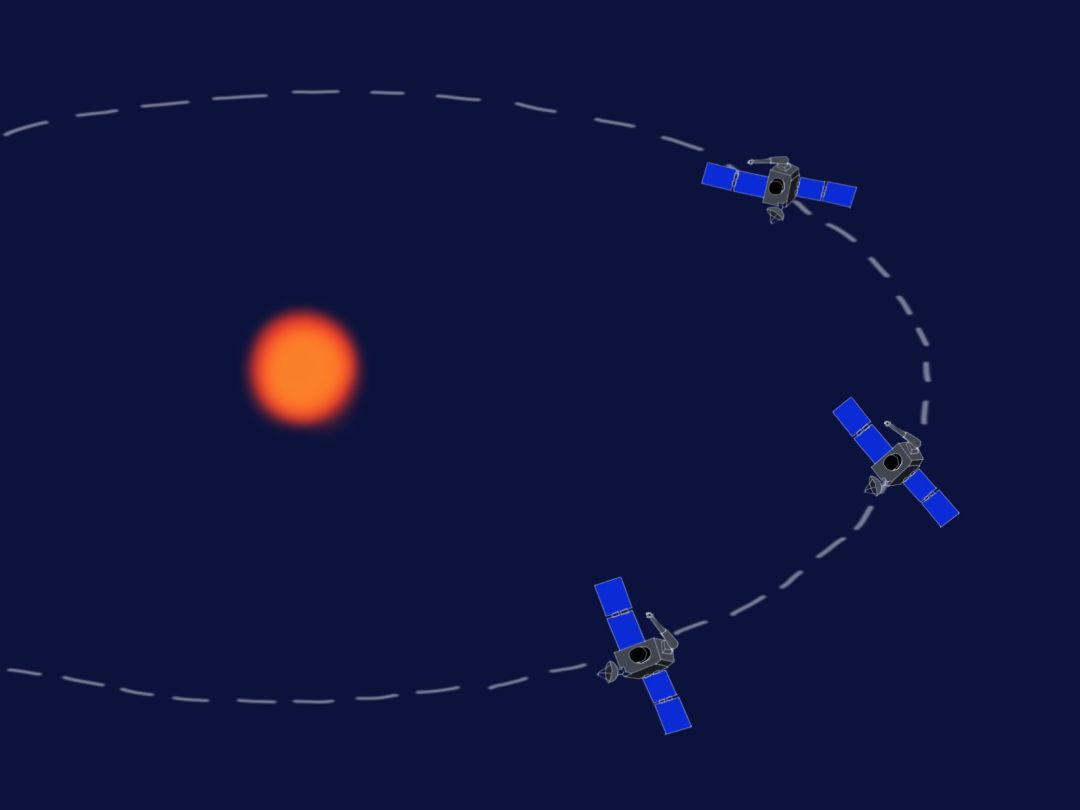
幸运的是
在行星际
有很多探测器都搭载了
接收探测射电波的仪器
比如说Wind以及STEREOA和B
这三个探测器
都是在地球公转轨道上运行
但是STEREO A/B 的相位和地球不同
所以在一些时候
STEREO探测器和WIND探测器的距离
甚至可以大于日地距离
一个探测器位置图示如下图
为了更准确的定位III型射电爆的位置
我们可以把III型暴本身的性质
引入到我们的模型中
因为行星际的磁场拓扑结构是螺线型
点击下方链接可查看具体原因
↓↓↓
又因为束流电子会沿着磁力线走
所以
这里我们可以假设
电子是沿着螺旋线走的
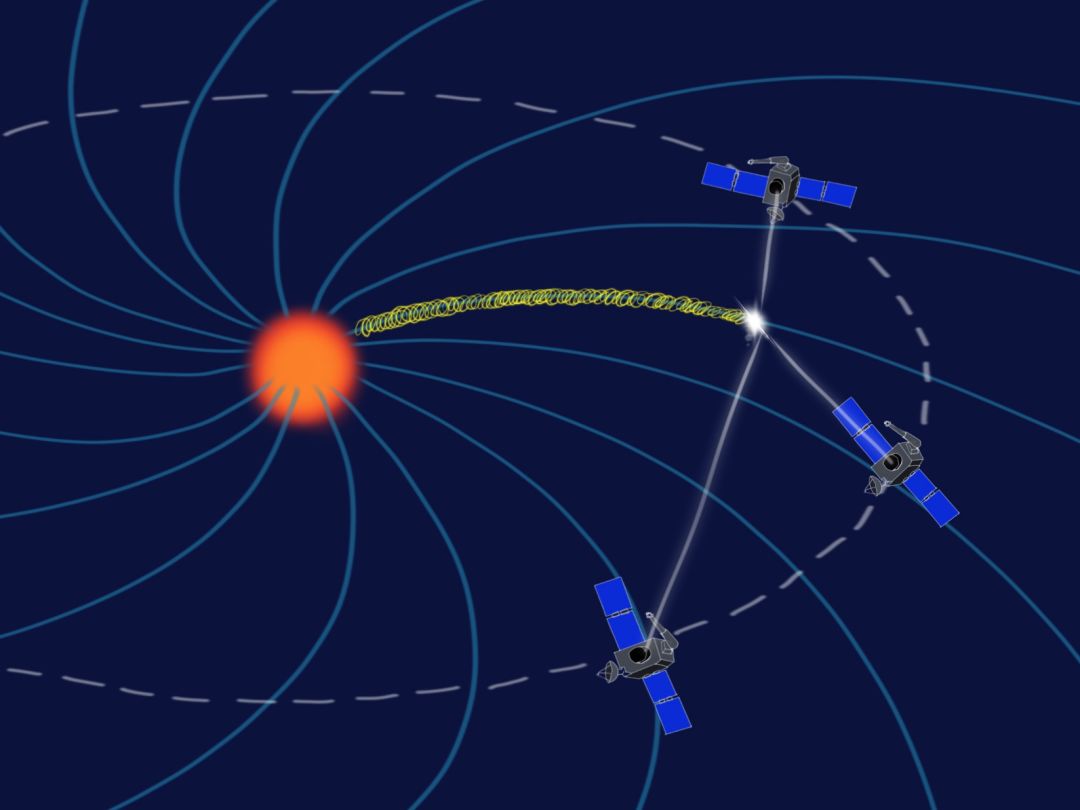
束流电子在行星际中激发的波
到达不同仪器的时间有微小差异(分钟级别)
而这种差异可以被仪器分辨出来
来看一下三个仪器接收到的数据
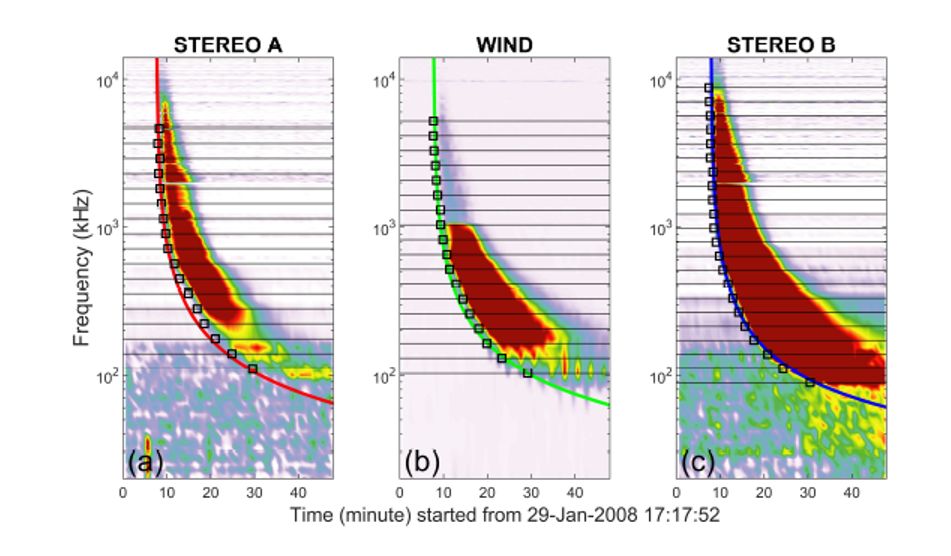
看起来比较相似
但是其前沿在时间先后上有微小差异
在这里
笔者的工作就是
提出一种模型
这种模型可以描述III型暴在行星际中的运动
以及激发的波
通过这个模型
我们可以生成
在某个位置产生的三型爆
在各个仪器接收到的前沿(如上图中的彩线)
我们设计了一套算法
尝试调节各种参数
来找到可以产生上述频谱图样的最可能路径
这个路径就是我们算法给出的
射电暴源区的可能路径
比如说,这个样子
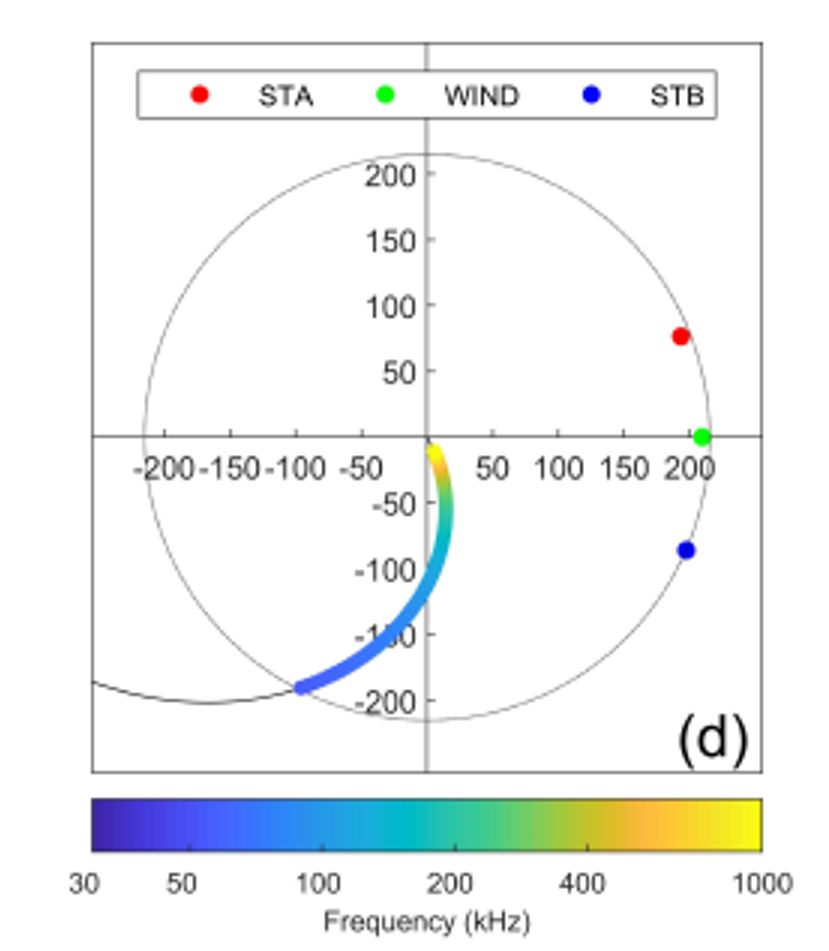
这就是我们使用“听声辨位”启发的射电轨迹定位算法
目前这个工作的文章已经被Solar Physics杂志接收
笔者的一点想法
现在的趋势是
仪器越来越多
精度越来越高
对于同一个事件
可能有很多仪器在同时观测
而多个仪器观测到的同一个事件
绝不仅仅是一个事件的多个copy
我们需要研究出来更新的方法
来整合多仪器的观测数据
从中提取有效信息
为了做到这一点
我们可能需要在观测数据的分析中
引入物理模型来做聚合分析
笔者这个工作就是做了这么个事情~
又及:中文版摘要如下~
撰稿:张沛锦
美编:江陵
来源:石头科普工作室
编辑:井上菌
近期热门文章Top10
↓ 点击标题即可查看 ↓
1. 我家在地震带上,你家呢?
2. 自然常数e到底自然在哪?
6. 仙童传奇
10. 为什么手指能滑动手机屏幕,手指甲却不能?| No.156




