【泡泡一分钟】边界框,分割与目标坐标轴:论自动驾驶场景中识别对于3D场景流估计的重要性
每天一分钟,带你读遍机器人顶级会议文章
标题:Bounding boxes, Segmentations and Object Coordinates: How Important is Recognition for 3D Scene Flow Estimation in Autonomous Driving Scenarios?
作者:Aseem Behl, Omid Hosseini Jafari, Siva Karthik Mustikovela, Hassan Abu Alhaija, Carsten Rother, Andreas Geiger.
来源:International Conference on Computer Vision (ICCV 2017)
编译:马可
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

现有的3D场景流估计方法通常难以应对较大位移与局部模糊等情况,例如缺乏纹理或者反射率较高的表面。然而这些挑战在本工作重点研究的动态道路场景中频繁出现。我们主要的贡献在于通过挖掘识别技术来解决这类3D运动估计问题。我们特别关注识别粒度的重要性,从2D实例分割估计得到的粗粒度2D包络框到细粒度3D物体部分的预测。我们借助一个由新标记的双目数据集训练得到的CNN网络来计算这些线索,并将其整合到一个用于鲁棒3D场景流估计的基于CRF的模型中,我们称此方法为直接场景流。我们在消融学习中分析每种识别线索的重要性并发现在我们的设定中,实例分割线索是目前最强壮的。我们在KITTI 2015具有挑战性的场景流基准上验证了我们方法的有效性,并且达到了目前业界最新效果标准。
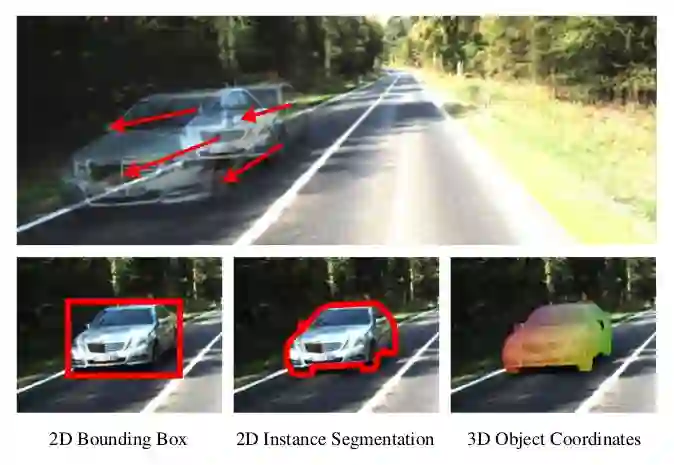
上图中,第一行为较大位移情况下的连续两帧,第二行为本文验证的三种几何线索:2D包络框,2D实例分割,3D物体坐标。

KITTI 2015数据集上的验证结果。

Abstract
Existing methods for 3D scene flow estimation often fail in the presence of large displacement or local ambiguities, e.g., at texture-less or reflective surfaces. However, these challenges are omnipresent in dynamic road scenes, which is the focus of this work. Our main contribution is to overcome these 3D motion estimation problems by exploiting recognition. In particular, we investigate the importance of recognition granularity, from coarse 2D bounding box estimates over 2D instance segmentations to fine-grained 3D object part predictions. We compute these cues using CNNs trained on a newly annotated dataset of stereo images and integrate them into a CRF-based model for robust 3D scene flow estimation - an approach we term Instance Scene Flow. We analyze the importance of each recognition cue in an ablation study and observe that the instance segmentation cue is by far strongest, in our setting. We demonstrate the effectiveness of our method on the challenging KITTI 2015 scene flow benchmark where we achieve state-of-the-art perfor-mance at the time of submission.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




