【Science机器人2019子刊AI5篇新论文】不止模仿:通过学习概念的认知程序实现机器人零数据任务迁移
【导读】国际顶级期刊《科学》(Science)杂志机器人子刊《科学·机器人学》(Science Robotics)2019年1月16号刊登了关于机器人在人工智能学习方面的5篇最新论文,详述零数据任务迁移学习、意图学习、强化学习运动技能等,是了解最新机器人技术的重要文献。
请关注专知公众号(点击标题下方蓝色专知关注)
后台回复“科学机器人” 就可以获取最新《科学》机器人论文下载链接~
专知《深度学习:算法到实战》2019年1月正在开讲,欢迎扫码报名!

5篇机器人AI论文
1. 不止模仿:通过学习概念的认知程序实现机器人零数据任务迁移
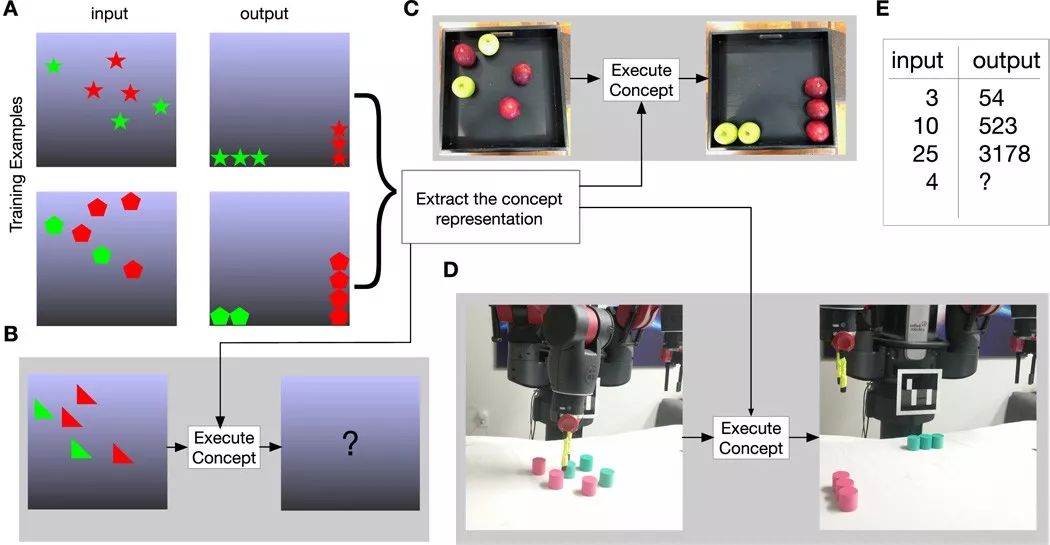
Beyond imitation: Zero-shot task transfer on robots by learning concepts as cognitive programs
http://robotics.sciencemag.org/content/4/26/eaav3150/tab-figures-data
人类可以从图像对中推断出概念,并将这些概念应用于完全不同的物理环境中,从而实现从图中进行宜家组装之类的任务。如果机器人能够表达和推断高级概念,那么它将显著提高理解我们意图和在不同环境之间传递任务的能力。为此,我们引入了一个复制人类概念学习方面的计算框架。概念表示为由视觉感知系统、工作记忆和动作控制器组成的计算机体系结构上的程序。这台认知计算机的指令集具有解析视觉场景、引导视线和注意力、想象新物体、操纵视觉工作记忆的内容以及控制手臂运动的指令。推断一个概念对应于诱导一个可以将输入转换为输出的程序。有些概念需要使用想象力和递归。以前学过的概念简化了后续更复杂概念的学习,并创建了抽象的层次结构。我们演示了机器人如何使用这些抽象概念来解释作为示意图图像呈现给它的新概念,然后将这些概念应用于非常不同的情况。通过将有关心理意象、感知符号、具身认知和指示机制的认知科学思想引入机器学习领域,我们的工作使我们更接近构建具有可解释表征和常识的机器人的目标。
2. 意图学习:机器人推理人类活动的意义
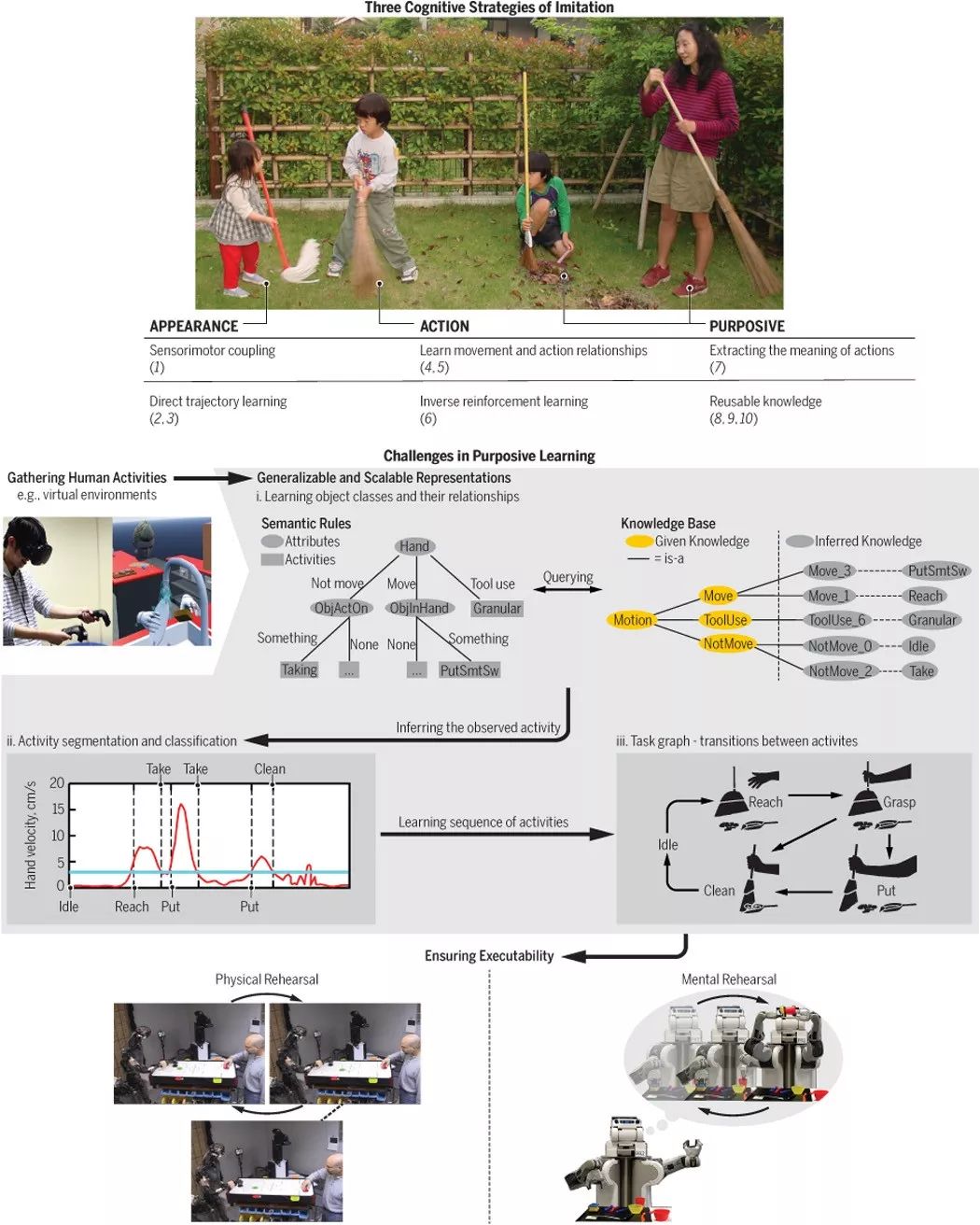
Purposive learning: Robot reasoning about the meanings of human activities
http://robotics.sciencemag.org/content/4/26/eaav1530
推理人类活动的意义是机器人向人类学习的一种强大方式。
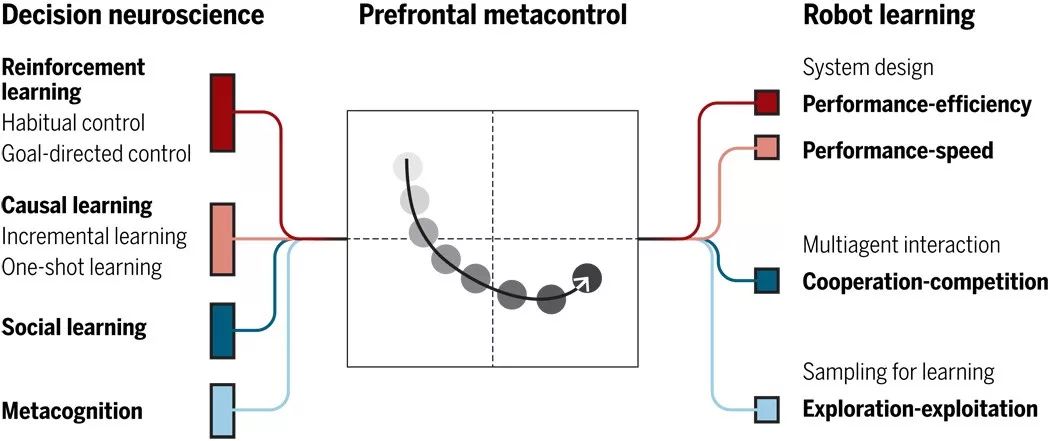
3. 从决策神经科学中学习高性能、快存储和快速强化学习
http://robotics.sciencemag.org/content/4/26/eaav2975
最近来自决策神经科学的见解为在充满噪音和不可预测性的真实动态环境中开发智能大脑启发的机器人学习解决方案带来了希望。
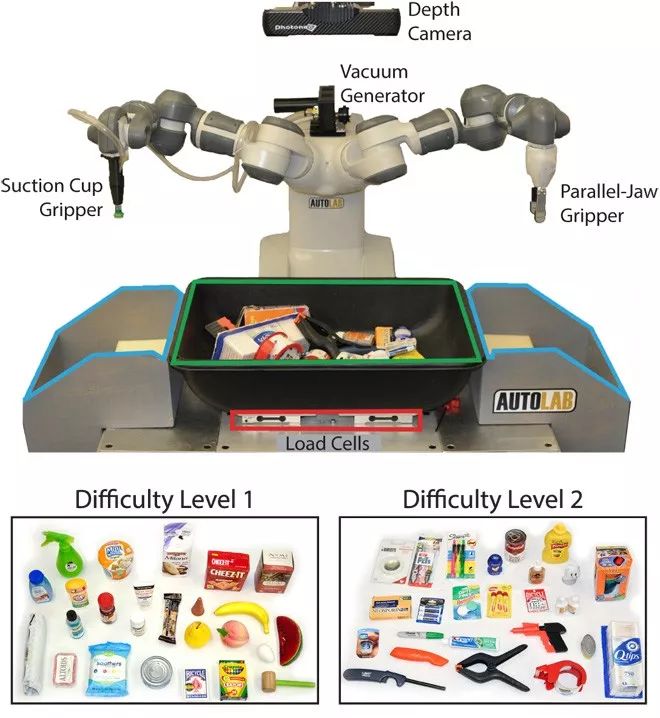
4. 学习双手灵巧的机器人抓取策略
对于电子商务订单执行、制造、检验和家庭服务机器人来说,通用拾取(Universal pick (UP),即可靠的机器人从成堆的新对象中抓取各种各样的新对象,是一个巨大的挑战。由于传感、控制和接触物理固有的不确定性,优化UP的速率、可靠性和范围是很困难的。本文研究的是“双灵巧”机器人抓取,其中使用了两个或多个异构的抓取器。我们提出灵巧网络(Dex-Net) 4.0,这是对Dex-Net以前版本的一个重要扩展,它通过使用物理和几何分析模型的域随机化在合成数据集上进行训练,学习给定一组抓取器的策略。我们为一个平行颚和真空吸盘夹持器的政策培训了5百万合成深度图像,抓取,和奖励从一堆三维物体产生的。在一个有两个夹子的物理机器人上,dx - net 4.0策略持续清除25个新对象的垃圾箱,可靠性超过95%,平均每小时清除300个以上的垃圾。
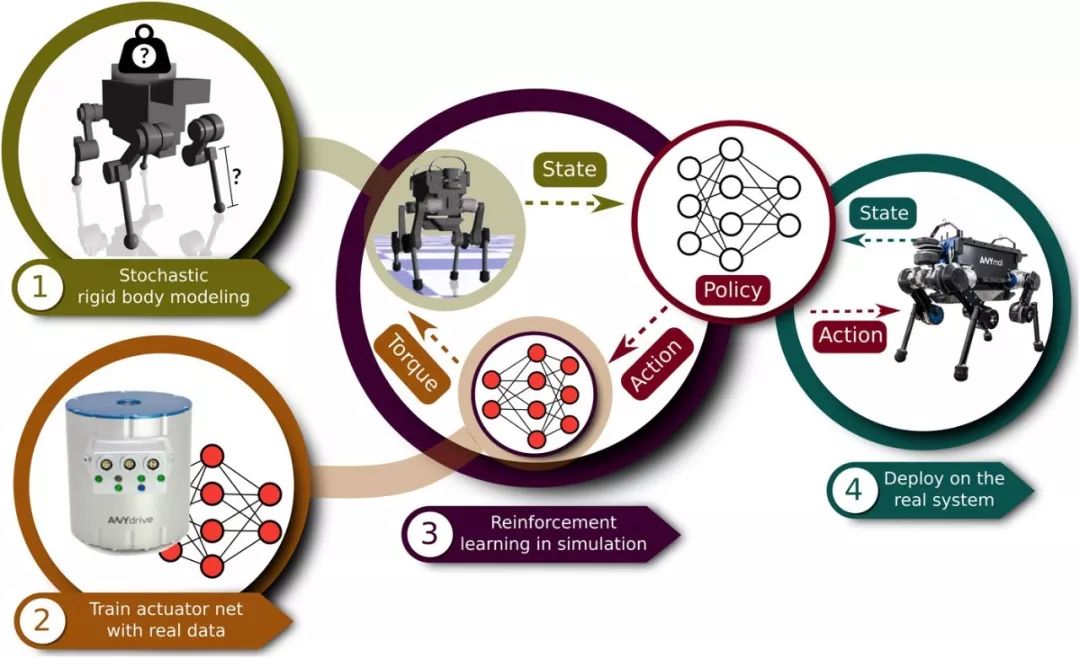
5. 有腿机器人学习灵活和动态运动技能
腿式机器人是机器人技术中面临的最大挑战之一。动物的动态、敏捷的动作是人类现有的方法无法模仿的。一个引人注目的替代方法是强化学习,它需要最小的工艺,并促进控制策略的自然演化。然而,到目前为止,对腿式机器人的强化学习研究主要局限于仿真,在实际系统中应用的简单实例较少。主要原因是,使用真实机器人进行训练,尤其是使用动态平衡系统,既复杂又昂贵。在目前的工作中,我们介绍了一种在仿真中训练神经网络策略的方法,并将其转移到最先进的腿式系统中,从而利用快速、自动化和经济有效的数据生成方案。这种方法适用于ANYmal机器人,一个复杂的中等大小的四足动物系统。通过模拟训练的策略,四足动物机器人获得了超越以往方法的运动技能:任何动物都能精确高效地遵循高水平的身体速度指令,比以前跑得更快,即使在复杂的情况下也能从坠落中恢复。
-END-
专 · 知
专知《深度学习: 算法到实战》课程正在开讲! 中科院博士为你讲授! 欢迎扫码报名学习!
请加专知小助手微信(扫一扫如下二维码添加),咨询《深度学习:算法到实战》参团限时优惠报名~

欢迎微信扫一扫加入专知人工智能知识星球群,获取专业知识教程视频资料和与专家交流咨询!

请PC登录www.zhuanzhi.ai或者点击阅读原文,注册登录专知,获取更多AI知识资料!

点击“阅读原文”,了解报名专知《深度学习:算法到实战》课程




