本文论证了人类操作员与基于人工智能(A.I.)的软件在规划和执行有人和无人驾驶军用直升机联合任务方面的合作。此外,还对这种基于人工智能的合作软件的设计和性能提出了要求。
为了建立论证,本文简要介绍了人类和人工智能的不同认知优势。在从中推导出最适合描述为 “混合主动性 ”的人机合作概念并描述了合作式人工智能系统原型的设计和实施之后,以主题专家(SMEs)为测试人员的实证分析为这种方法提供了进一步的支持论据。
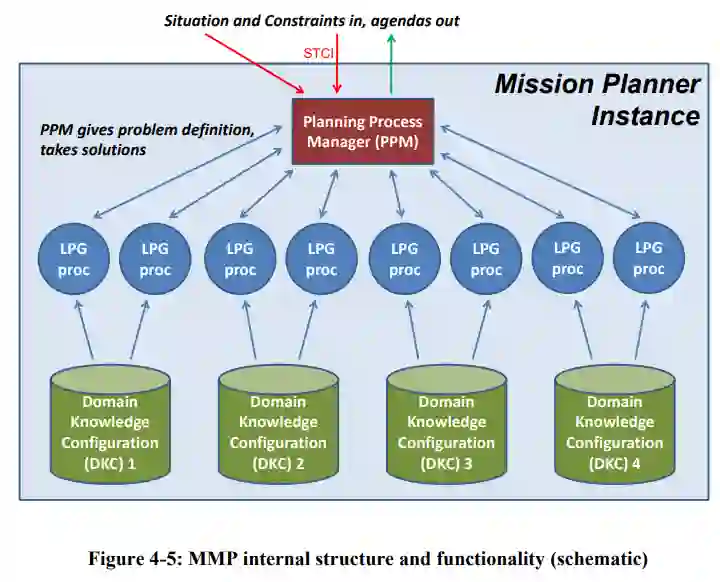
这里提出的合作概念基于这样一个假设,即几乎不可能事先知道哪个子任务(或子问题)适合分配给人类或自动化这两个合作伙伴中的任何一方。这是因为双方的能力各不相同,而且每项任务或问题都可能有不同的结构,需要特定的解决问题的能力。因此,人机混合团队中的每一个伙伴都应能够掌握解决问题的主动权,即调整或改进任务计划和开始执行任务的主动权。这就是混合主动规划、重新规划和计划执行方法,也是作者设计和实施的混合主动任务规划器(MMP)的基础,它利用了象征性人工智能技术(经典的、与领域无关的自动规划)。
实证分析是以德国陆军专业飞行员作为主题专家,在两种主要配置下进行的全任务模拟实验:有人工智能任务规划和执行组件支持和无人工智能任务规划和执行组件支持。如本论文所示,中小型企业验证了分析的代表性。然而,由于只有 8 名测试人员,因此难以进行统计验证,主要证据是基于他们系统收集的主观反馈,这些反馈表明,飞行任务管理系统提供的建议和解决方案被认为是有用的,而不是有碍观瞻的。
最后,本论文能够为这一应用领域的合作式人工智能系统的需求和设计提供依据。这也是通过系统地收集试验人员在试验活动后对用户需求的主观反馈来实现的。这些反馈还包括有关备选任务规划工作流程和人机界面设计的信息。
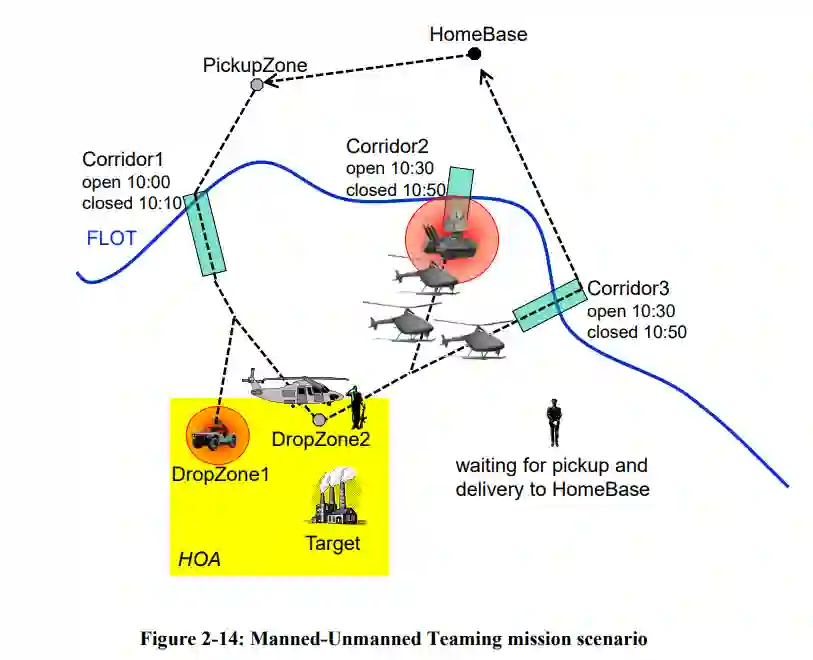
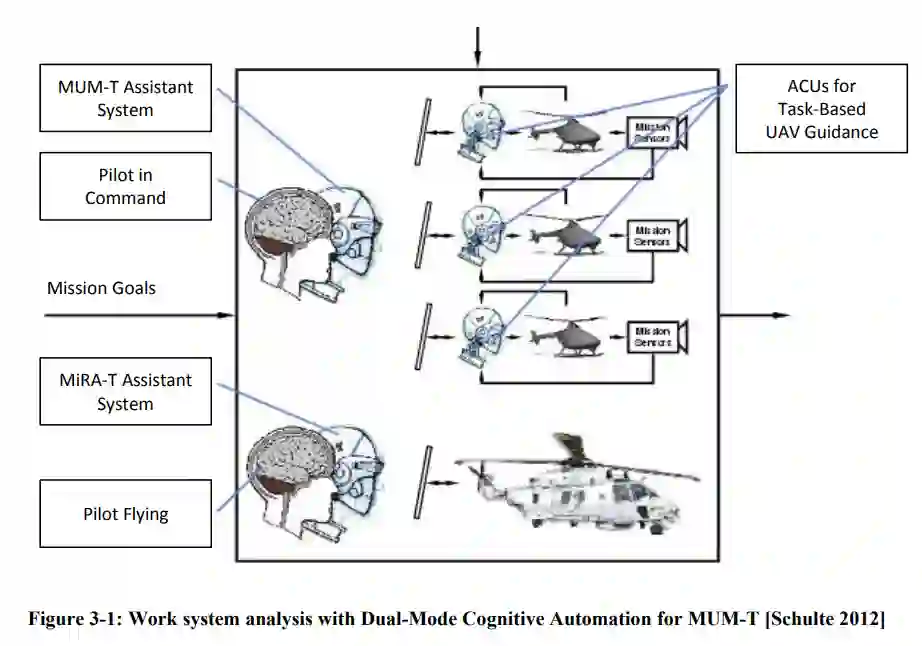
本论文的结构如下。下一章介绍本论文的相关背景。其中包括人与无人机交互的发展现状和该领域的最新研究,以及人机合作规划的主题和名为 “有人-无人编队协同”(MUM-T)的具体项目。第 2 章还将详细介绍本论文关于 MUM-T 任务混合主动规划的研究问题。随后,在第 3 章和第 4 章中,详细介绍了 MMP 的要求、构思、设计和实施,以回答上述研究问题 1。第 5 章介绍了为评估 MMP 而进行的实验以及相应的结果。其中包括收集用户对混合动力多无人机任务规划系统的需求(研究问题二)。最后,第 6 章讨论了全部工作,并提出了与未来研究相关的问题。第 7 章总结了本论文的全部内容。