本文探讨了自主无人机系统(UAS)的制导和控制。具体而言,研究了基于模型参考自适应控制(MRAC)的尾翼无人机系统,以及用于战术机动和覆盖的多旋翼无人机系统的制导和控制。调查了当前和潜在的应用,并找出了现有技术的差距。
为了解决四旋翼无人机这一特殊类别的尾翼无人机系统的控制问题,研究人员开发了两种方法,以解决建模不确定性、未建模有效载荷、阵风以及执行器故障和失灵等问题。在第一种方法中,尾翼无人机系统的纵向动力学采用 MRAC 法进行调节,以在新颖的控制架构中实现规定性能和输出跟踪。用于规定性能和输出跟踪的 MRAC 法则结合了线性二次调节器 (LQR) 基线控制器,使用积分反馈互连。利用障碍 Lyapunov 函数对轨迹跟踪误差进行约束,并通过采用轨迹跟踪误差瞬态动态参考模型来保证用户定义的轨迹跟踪误差收敛速率。在该控制系统中,平移和旋转动力学分别分为外环和内环,以考虑到四旋翼双翼飞行器的动力不足问题。在外环中,气动力的估计值和 MRAC 法则用于稳定平移动力学。此外 此外,还推导出参考俯仰角,使飞行器的总推力永远不会指向地球,以确保安全,并避免通常用于确定方向的带符号反正切函数固有的不连续性。在内环中,气动力矩的估计值和 MRAC 法则用于稳定旋转动力学。此外,还提出了一种用于确定所需总推力的法则,该法则可确保如果飞行器的方位与所需方位足够接近,则会施加适当的推力。还提出了一种控制分配方案,以确保始终实现所需的推力力矩,并满足对执行器产生的推力的非负约束。仿真验证了针对规定性能和输出信号跟踪采用 MRAC 的控制架构,并将规定性能 MRAC 法与经典 MRAC 法进行了比较。
在第二种方法中,提出了一种基于 MRAC 的统一控制架构,该架构没有将纵向和横向动力学分开。平移和旋转动力学分别被分离为外环和内环,以解决尾翼无人机系统的动力不足问题。由于预计飞行器会发生较大的旋转,因此使用无奇异性的四元数来捕捉尾翼的方向。此外,还通过使用障壁 Lyapunov 函数来解决卷扬现象,以确保跟踪误差四元数的第一个分量为正,从而按照最短的旋转将飞行器的当前方位驱动到参考方位。在外环中,利用对空气动力的估计和 MRAC 法则确定所需的推力。参考方位是根据正交普罗克斯特问题的解确定的,该问题可找到从当前推力方位到所需推力方位的最小旋转。由于正交普罗克里斯特问题的不连续性质,角速度和加速度无法通过对正交普罗克里斯特问题解的时间导数来推导。奇异值分解的不连续性。因此,我们使用两次连续可微分函数--球面线性插值,来寻找连接捕捉车辆当前方位的单元四元数和捕捉参考方位的单元四元数的大地线。一个有趣的结果是,角速度和加速度只取决于参数化球面线性插值函数的标量值函数的一阶导数和二阶导数;实际函数并不重要。然而,确定该函数的形状并非易事,因此采用了受模型预测控制启发的方法。在内环中,使用气动力矩估计值和 MRAC 法来稳定旋转动力学,并将推力分配给各个螺旋桨。建议的控制方案的有效性通过仿真得到了验证。
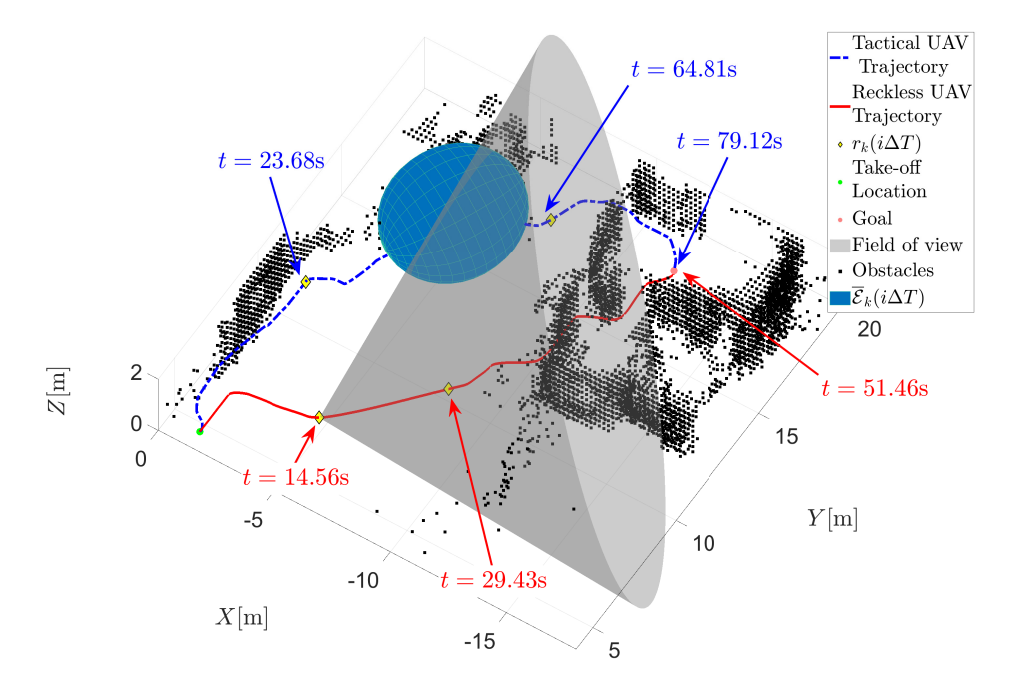
提出了一种用于自主无人机系统的集成制导和控制系统,可在未知、动态和潜在的敌对环境中,按照用户规定的不计后果或战术方式进行机动。在该制导和控制系统中,战术操纵是通过在飞行器接近目标时利用环境中的障碍物来实现的。不计后果的机动是通过在向目标前进时忽略附近障碍物的存在,同时保持不发生碰撞来实现的。鲁莽行为和战术行为的划分受到生物启发,因为动物或地面部队都会使用这些战术。制导系统融合了路径规划器、避免碰撞算法、基于视觉的导航系统和轨迹规划器。路径规划器以 A∗ 搜索算法为基础,并提出了可定制调整的 "到达成本"(cost-to-come)和启发式函数,通过降低底层图中捕获靠近障碍物集的节点的边的权重,利用障碍物集进行躲避。启发式的一致性已经确定,因此,搜索算法将返回最优解,而不会多次扩展节点。在现实场景中,需要快速重新规划,以确保系统实现所需的行为,并且不会与障碍物发生碰撞。轨迹规划器基于快速模型预测控制(fMPC),因此可以实时执行。此外,还采用了一个自定义的可调成本函数,该函数权衡了与障碍物集的接近程度和与目标的接近程度的重要性,为实现战术行为提供了另一种机制。新颖的避免碰撞算法是基于解决一类特殊的半有限编程问题,即二次辨别问题。避撞算法通过寻找将无人机系统与障碍物集分隔开来的椭球体,生成无人机系统附近自由空间的凸集。凸集在 fMPC 框架中用作不等式约束。避撞算法的计算负担是根据经验确定的,并证明比文献中的两种类似算法更快。上述模块被集成到一个单一的制导系统中,该系统为任意控制系统提供参考轨迹,并在多次模拟和飞行测试中展示了所提方法的有效性。此外,还提出了飞行行为分类法,以了解可调参数如何影响最终轨迹的鲁莽性或隐蔽性。
最后,介绍了用于自主无人机系统的综合制导和控制系统,该系统可在未知、动态和潜在敌对环境中,按照用户的要求,以不计后果或战术的方式执行战术覆盖。覆盖的制导问题涉及收集环境信息的策略和路线规划。收集未知环境信息的目的是帮助服务组织和第一反应人员了解态势和制定计划。为解决这一问题,需要综合考虑目标选择、路径规划、避免碰撞和轨迹规划。我们提出了一种基于八叉树数据结构的新型目标选择算法,用于为路径规划器自主确定目标点。在该算法中,由导航系统推导出的体素地图捕捉了环境中各区域的占用和探索状态,并被分割成捕捉大面积未探索区域和大面积已探索区域的分区。大面积未探索区域被用作候选目标点。目标点的可行性通过采用贪婪 A∗ 技术来确定。该算法拥有可调参数,允许用户在确定目标点序列时指定贪婪或系统行为。这种技术的计算负担是根据经验确定的,并证明可在现实场景中实时使用。路径规划器基于终身规划 A∗(LP A∗)搜索算法,与 A∗技术相比,该算法更具优势。此外,还提出了一种可自定义调整的成本-归宿和启发式函数,以实现战术或鲁莽的路径规划。提出了一种新的避免碰撞算法,作为上述避免碰撞算法的改进版本,改进了所产生的约束集的体积,从而使更多的自由空间被凸集捕获,因此,轨迹规划者可以利用更多的环境进行战术机动。该算法基于半定量编程和快速近似凸壳算法。轨迹规划器以 fMPC 为基础,采用自定义成本函数,通过滑行障碍物表面实现战术机动,并将所需加速度作为与掩体距离的函数进行调节;采用障碍函数约束飞行器的姿态并确保推力正向性;采用四旋翼无人机系统的输出反馈线性化运动方程作为微分约束,以实现积极的机动。利用定制的 C++ 模拟器验证了所提系统的功效。
本论文将探讨在海洋环境中运行的自主无人机系统在制导和控制算法方面存在的一些不足。